一种机电安装故障智能检测设备的制作方法
1娱乐游戏属于检测设备技术领域,尤其涉及一种机电安装故障智能检测设备。
背景技术:
2.机电设备在进行安装的时候,最为基础的部件就是螺栓以及螺母的连接,也是问题出现最为频繁的部位,如果连接操作不当,比如将螺栓和螺母连接过于紧密,进而导致螺栓长期受到机械力的影响,给金属带来十分巨大的压力,从而出现疲劳的问题,导致螺牙出现损伤,并且随着时间的推移而逐渐的磨平,导致设备之间的装配连接就会十分松动,不能正常的进行工作,带来十分严重的后果,因此机电设备安装后需要进行定期检查。
3.现有技术中,图像比较法是常用的一种检测螺栓是否松动的检测方法,即通过拍摄图片与最初状态的图片进行对比,判断螺栓的位置是否变动以判断是否出现松动,此种方法快捷有效,由于设备限制无法停留在高空位置,因此不便于对行车轨道等处于高空区域的连接位置进行检测,现有的机电安装故障智能检测设备大多通过智能小车吸附在金属架外表面来进行拍摄操作,在智能小车出现故障时,容易从金属架外表面掉落,且智能小车的使用范围较小,不能快速实现对机电安装部位进行拍摄操作。
4.为避免上述技术问题,确有必要提供一种机电安装故障智能检测设备以克服现有技术中的所述缺陷。
技术实现要素:
5娱乐游戏的目的在于提供一种机电安装故障智能检测设备,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种机电安装故障智能检测设备,包括无人机和拍摄机构,所述拍摄机构包括:
8.固定架,安装在所述无人机上侧中部,所述固定架顶端设有电磁铁,所述固定架和电磁铁之间安装有伸缩组件,用于减小电磁铁与金属架表面接触时对无人机的冲击;
9.所述固定架外侧安装有旋转环,所述旋转环与固定架转动连接,旋转环外侧设有摄像头,所述旋转环外壁上安装有高度调节组件,高度调节组件与摄像头连接,用于调节摄像头与金属架表面之间的距离;
10.所述无人机和旋转环之间安装有旋转组件,用于使旋转环带动高度调节组件和摄像头进行水平方向的角度调节并进行固定。
11.作为本实用新型进一步的技术方案:所述伸缩组件包括:
12.限位槽,位于所述固定架中部,所述限位槽内侧设有移动杆,所述移动杆顶端与电磁铁固定连接,所述限位槽内侧还安装有弹性件,弹性件与所述移动杆连接,用于调节移动杆在限位槽内侧的位置。
13.作为本实用新型进一步的技术方案:所述高度调节组件包括:
14.固定框,固定安装在所述旋转环外壁上,所述固定框内侧设有移动筒,所述摄像头
固定安装在移动筒顶端,所述固定框内侧底端固定安装有第一驱动件,第一驱动件输出端安装有驱动杆,所述驱动杆与移动筒内壁螺纹连接。
15.作为本实用新型进一步的技术方案:所述旋转组件包括:
16.定位槽,位于所述旋转环内侧一端,所述定位槽内侧安装有第一齿条,所述固定架一侧安装有第二驱动件,第二驱动件输出端安装有驱动齿,所述驱动齿与第一齿条啮合连接;
17.所述定位槽和固定架之间还安装有固定组件,用于对旋转环在固定架外侧的位置进行固定。
18.作为本实用新型进一步的技术方案:所述固定组件包括:
19.第三驱动件,固定安装在所述固定架远离第二驱动件一侧,所述第三驱动件输出端固定安装有定位齿,所述定位槽内侧顶端固定安装有第二齿条,所述定位齿与第二齿条啮合连接。
20.相较于现有技术,本实用新型的有益效果如下:
21娱乐游戏提供的一种机电安装故障智能检测设备,所述无人机上侧中部固定安装有固定架,通过伸缩组件可有效方便电磁铁与金属架表面进行连接,并保持无人机吸附在金属架表面,通过旋转组件可对旋转环和摄像头在水平方向的角度进行调节并进行固定,方便摄像头进行稳定拍摄,通过高度调节组件,可对摄像头在竖直方向的位置进行调节,方便摄像头对机电安装部位进行精准拍摄,操作便捷,能够快速对机电安装部位进行拍摄操作。
附图说明
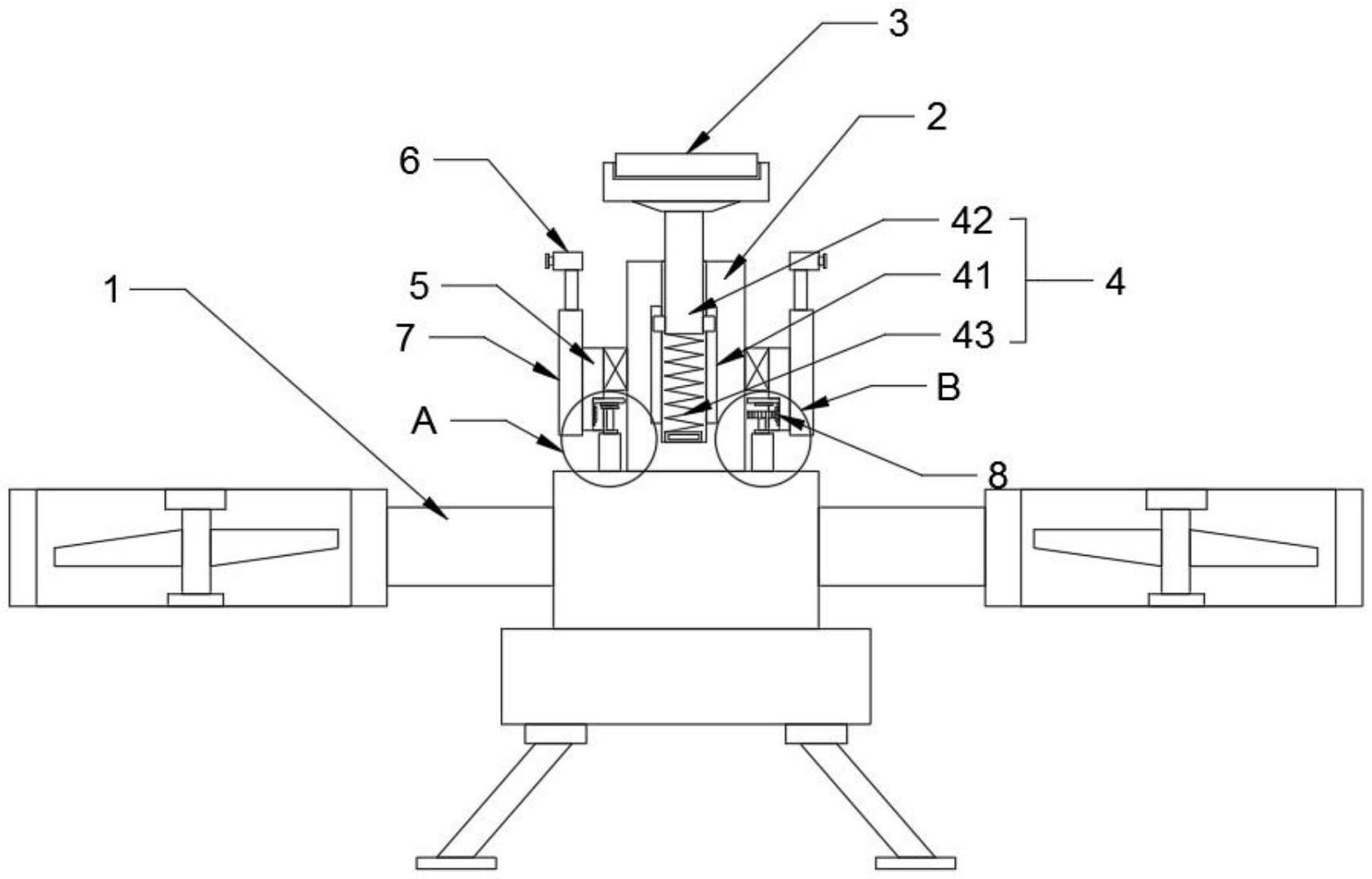
22.图1为本实用新型的结构示意图。
23.图2为本实用新型中高度调节组件的结构示意图。
24.图3为本实用新型图1中a处放大的结构示意图。
25.图4为本实用新型图1中b处放大的结构示意图。
26.附图中:1-无人机、2-固定架、3-电磁铁、4-伸缩组件、41-限位槽、42-移动杆、43-弹性件、5-旋转环、6-摄像头、7-高度调节组件、71-固定框、72-移动筒、73-第一驱动件、74-驱动杆、8-旋转组件、81-定位槽、82-第一齿条、83-第二驱动件、84-驱动齿、85-固定组件、851-第三驱动件、852-定位齿、853-第二齿条。
具体实施方式
27.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
28.以下结合具体实施例对本实用新型的具体实现进行详细描述。
29.如图1~4所示,为本实用新型提供的实施例中,一种机电安装故障智能检测设备,包括无人机1和拍摄机构,所述拍摄机构包括:
30.固定架2,安装在所述无人机1上侧中部,所述固定架2顶端设有电磁铁3,所述固定架2和电磁铁3之间安装有伸缩组件4,用于减小电磁铁3与金属架表面接触时对无人机1的
冲击;
31.所述固定架2外侧安装有旋转环5,所述旋转环5与固定架2转动连接,旋转环5外侧设有摄像头6,所述旋转环5外壁上安装有高度调节组件7,高度调节组件7与摄像头6连接,用于调节摄像头6与金属架表面之间的距离;
32.所述无人机1和旋转环5之间安装有旋转组件8,用于使旋转环5带动高度调节组件7和摄像头6进行水平方向的角度调节并进行固定。
33.在本实施例中,所述无人机1上侧中部固定安装有固定架2,通过伸缩组件4可有效方便电磁铁3与金属架表面进行连接,并保持无人机1吸附在金属架表面,通过旋转组件8可对旋转环5和摄像头6在水平方向的角度进行调节并进行固定,方便摄像头6进行稳定拍摄,通过高度调节组件7,可对摄像头6在竖直方向的位置进行调节,方便摄像头6对机电安装部位进行精准拍摄,操作便捷,能够快速对机电安装部位进行拍摄操作,所述固定架2的形状为圆筒状,固定架2和旋转环5之间安装有滚动轴承,旋转环5可在固定架2外壁上进行稳定旋转。
34.在本实用新型的一个实施例中,请参阅图1,所述伸缩组件4包括:
35.限位槽41,位于所述固定架2中部,所述限位槽41内侧设有移动杆42,所述移动杆42顶端与电磁铁3固定连接,所述限位槽41内侧还安装有弹性件43,弹性件43与所述移动杆42连接,用于调节移动杆42在限位槽41内侧的位置。
36.在本实施例中,弹性件43为弹簧,所述弹性件43一端与限位槽41内侧底端连接,另一端与移动杆42连接,方便电磁铁3与金属架表面进行连接,并在连接过程中减小无人机1受到的冲击,有效保持无人机1并方便电磁铁3进行工作。
37.在本实用新型的一个实施例中,请参阅图1和图2,所述高度调节组件7包括:
38.固定框71,固定安装在所述旋转环5外壁上,所述固定框71内侧设有移动筒72,所述摄像头6固定安装在移动筒72顶端,所述固定框71内侧底端固定安装有第一驱动件73,第一驱动件73输出端安装有驱动杆74,所述驱动杆74与移动筒72内壁螺纹连接。
39.在本实施例中,所述固定框71内侧与移动筒72凹凸连接,移动筒72可沿着固定筒内侧进行位置移动,所述第一驱动件73在本实施例中为旋转电机,所述驱动杆74在本实施例中为螺纹杆,移动筒72内壁设有螺纹,驱动杆74外侧与移动筒72内壁螺纹连接,当第一驱动件73控制驱动杆74进行旋转时,方便实现移动筒72沿着固定框71内侧进行竖直方向的位置移动,所述移动筒72的剖面形状为正方形,能够有效避免移动筒72跟随旋转杆在固定框71内侧进行旋转,方便移动筒72带动摄像头6进行竖直方向的位置移动。
40.在本实用新型的一个实施例中,请参阅图1、图3和图4,所述旋转组件8包括:
41.定位槽81,位于所述旋转环5内侧一端,所述定位槽81内侧安装有第一齿条82,所述固定架2一侧安装有第二驱动件83,第二驱动件83输出端安装有驱动齿84,所述驱动齿84与第一齿条82啮合连接;
42.所述定位槽81和固定架2之间还安装有固定组件85,用于对旋转环5在固定架2外侧的位置进行固定。
43.所述固定组件85包括:
44.第三驱动件851,固定安装在所述固定架2远离第二驱动件83一侧,所述第三驱动件851输出端固定安装有定位齿852,所述定位槽81内侧顶端固定安装有第二齿条853,所述
定位齿852与第二齿条853啮合连接。
45.在本实施例中,所述第一齿条82和第二齿条853的形状均为圆环状,所述第一齿条82与驱动齿84啮合连接,第二驱动件83在本实施例中为旋转电机,当第二驱动件83控制驱动齿84进行旋转时,方便驱动第一齿条82和旋转环5在固定架2外侧进行旋转,所述第三驱动件851在本实施例中为伸缩电机,所述第三驱动件851可驱动定位齿852进行竖直方向的位置移动,方便定位齿852与第二齿条853进行连接和分离,当定位齿852与第二齿条853连接时,可对旋转环5在固定架2外侧的位置进行固定。
46娱乐游戏的工作原理是:
47.在本实用新型中,首先控制无人机1飞行到金属架表面,并开启电磁铁3,使电磁铁3吸附在金属架表面,在电磁铁3完全吸附在金属架表面后,关闭无人机1,然后通过控制第二驱动件83和第三驱动件851进行工作,此时定位齿852与第二齿条853分离,驱动齿84旋转控制第一齿条82带动旋转环5进行旋转,使摄像头6在水平方向的角度进行调节,在角度调节后,第二驱动件83停止工作,第三驱动件851控制定位齿852与第二齿条853连接,对旋转环5的位置进行固定,再通过控制第一驱动件73,对摄像头6在竖直方向的位置进行调节,完成对机电安装部位进行拍摄操作,在操作完成后,可开启无人机1,并关闭电磁铁3,无人机1可前往下一个需要检测的位置。
48.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
49.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1