一种物流无人机悬停装置的制作方法
1娱乐游戏涉及无人机物流设备技术领域,具体地说,涉及一种物流无人机悬停装置。
背景技术:
2.无人机快递,即通过利用无线电遥控设备和自备的程序控制装置操纵的无人驾驶的低空飞行器运载包裹,自动送达目的地,其优点主要在于提高配送效率、减少人力成本,同时解决人力通行不便地区的配送问题。
3.公开号为cn216611623u的专利公开了一种机载物流箱、无人机和无人机配送系统,涉及无人机配送领域,包括箱体,还包括设置在所述箱体上用于调整箱体内温度的温度调节元件和第一接口,所述温度调节元件与所述第一接口连接,所述第一接口构造为当所述箱体装载到无人机上后能够与该无人机上的温控源连接,从而通过无人机为所述温度调节元件提供温控源,本公开能够巧妙利用无人机配送的特点,以简单的箱体结构实现了物流箱内部的温度控制,避免所配送物品出现受外界温度影响产生品质受损的情况。
4.虽然上述技术方案能够巧妙利用无人机配送的特点,以简单的箱体结构实现了物流箱内部的温度控制,避免所配送物品出现受外界温度影响产生品质受损的情况,但是在无人机不使用时,需要进行降落,在无人机降落时与地面之间存在一定的冲击,长时间频繁降落会造成无人机底盘损坏,不便于无人机的长期使用。
技术实现要素:
5娱乐游戏的目的在于提供一种物流无人机悬停装置,以解决上述背景技术中提出的在无人机降落时与地面之间存在一定的冲击,长时间频繁降落会造成无人机底盘损坏,不便于无人机的长期使用问题。
6.为实现上述目的,本实用新型提供了一种物流无人机悬停装置,包括安装座,所述安装座的一侧水平安装有安装臂,所述安装臂的外端安装有两个对称设置的夹持臂,所述夹持臂的内侧夹持有挂载件,所述挂载件的底端安装在无人机上,所述安装臂的外壁安装有电机,所述夹持臂的顶端安装在电机的输出轴上,所述夹持臂为l形结构,且底端安装有卡钩,所述挂载件包括悬挂块,所述悬挂块的底部开设有卡槽,当所述挂载件位于两个夹持臂之间时,所述夹持臂能够相互靠近并通过卡钩卡在卡槽内部。
7.作为优选,所述安装座的外壁安装有处理器。
8.作为优选,所述安装臂的底部位于两个夹持臂之间处安装有限位块,所述限位块的底部安装有红外传感器。
9.作为优选,所述电机控制夹持臂运动时,所述夹持臂之间的最大张开夹角为120
°
。
10.作为优选,所述卡钩的顶部安装有第一磁吸片,所述卡槽的内壁安装有第二磁吸片,当所述夹持臂相互靠近并通过卡钩卡在卡槽内部时,所述第一磁吸片和第二磁吸片相互吸附。
11.作为优选,所述悬挂块的底端安装有悬挂杆,所述悬挂杆的底端固定在无人机的顶部。
12.作为优选,所述悬挂杆的底端安装有底座,所述底座通过锁紧螺栓与无人机连接。
13.与现有技术相比,本实用新型的有益效果:
14.1、该物流无人机悬停装置中,通过夹持臂能够对挂载件进行夹持,通过挂载件安装在无人机上,实现无人机在空中的悬停操作,避免频繁起降造成无人机的底盘损坏。
15.2、该物流无人机悬停装置中,红外传感器能够感应到无人机靠近,进而迅速进行夹持,通过卡钩与卡槽的配合能够保证挂载稳定,不会造成无人机在空中产生晃动。
附图说明
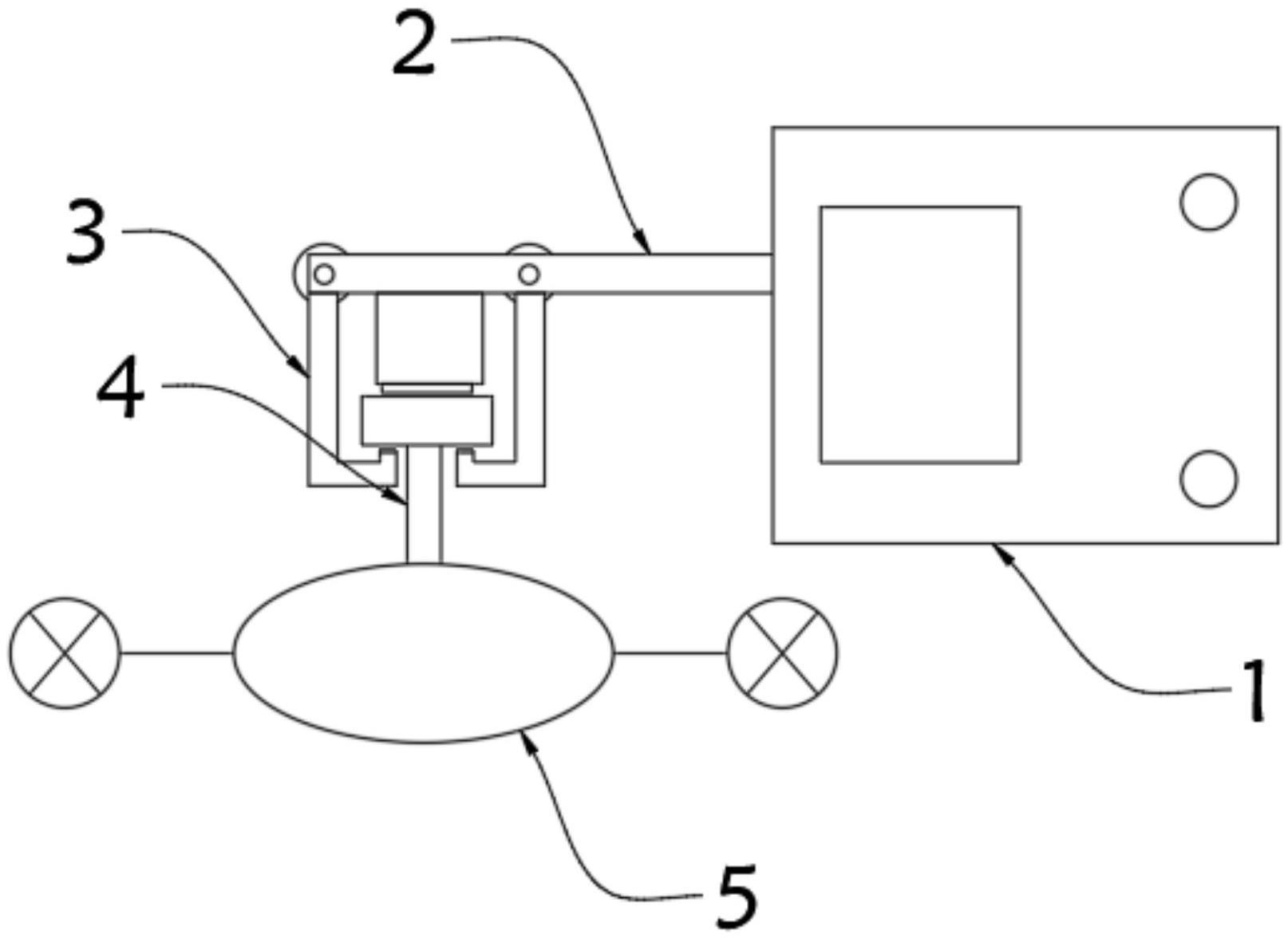
16.图1为本实用新型的使用示意图;
17.图2为本实用新型的整体结构示意图;
18.图3为本实用新型中挂载件的结构示意图。
19.图中各个标号意义为:
20.1、安装座;11、处理器;2、安装臂;21、限位块;211、红外传感器;22、电机;3、夹持臂;31、卡钩;32、第一磁吸片;4、挂载件;41、悬挂块;411、卡槽;412、第二磁吸片;42、悬挂杆;43、底座;431、锁紧螺栓;5、无人机。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22娱乐游戏提供一种物流无人机悬停装置,如图1-图3所示,包括安装座1,安装座1的一侧水平安装有安装臂2,安装臂2的外端安装有两个对称设置的夹持臂3,用于张开或者闭合起到夹持效果,夹持臂3的内侧夹持有挂载件4,挂载件4的底端安装在无人机5上,通过挂载件4固定在夹持臂3上,实现对无人机5的悬停操作,安装臂2的外壁安装有电机22,夹持臂3的顶端安装在电机22的输出轴上,夹持臂3为l形结构,且底端安装有卡钩31,挂载件4包括悬挂块41,悬挂块41的底部开设有卡槽411,当挂载件4位于两个夹持臂3之间时,夹持臂3能够相互靠近并通过卡钩31卡在卡槽411内部,保证无人机5挂载稳定,不会脱落。
23.本实施例中,安装座1的外壁安装有处理器11,处理器11为plc单片机。
24.具体的,安装臂2的底部位于两个夹持臂3之间处安装有限位块21,限位块21的底部安装有红外传感器211,处理器11的输入端与红外传感器211的输出端电性连接,处理器11的输出端与电机22的输入端电性连接。
25.进一步的,电机22控制夹持臂3运动时,夹持臂3之间的最大张开夹角为120
°
,便于挂载件4的进入。
26.进一步的,卡钩31的顶部安装有第一磁吸片32,卡槽411的内壁安装有第二磁吸片412,当夹持臂3相互靠近并通过卡钩31卡在卡槽411内部时,第一磁吸片32和第二磁吸片412相互吸附,进一步提高卡钩31与卡槽411的连接紧密程度,避免滑脱。
27.进一步的,悬挂块41的底端安装有悬挂杆42,悬挂杆42的底端固定在无人机5的顶部,便于挂载件4的拆卸维护。
28.进一步的,悬挂杆42的底端安装有底座43,底座43通过锁紧螺栓431与无人机5连接,便于悬挂杆42的拆装。
29娱乐游戏的物流无人机悬停装置在使用时,首先将该装置安装在高空,通过安装座1固定在外部支架的高处,不使用时,两个夹持臂3张开,当无人机5靠近时,红外传感器211感应到无人机5的靠近,此时通过处理器11控制电机22工作,电机22带动夹持臂3实现靠近的动作,通过夹持臂3将挂载件4进行夹持,夹持臂3能够相互靠近并通过卡钩31卡在卡槽411内部,保证无人机5挂载稳定,不会脱落,并且当夹持臂3相互靠近并通过卡钩31卡在卡槽411内部时,第一磁吸片32和第二磁吸片412相互吸附,进一步提高卡钩31与卡槽411的连接紧密程度,避免滑脱,保证无人机5的悬停,当不需要悬停时,将该装置按相反步骤操作即可。
30.最后,需要说明的是,本实施例中的电机22等,上述部件中的电子元器件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本领域技术人员可通过技术手册得知或通过常规实验方法获知,在本装置空闲处,将上述中所有电器件分别通过导线进行连接,具体连接手段应参考上述工作原理中各电器件之间先后工作顺序完成电性连接,其均为本领域公知技术。
31.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1