交感钟表组件的制作方法
1.本发明涉及最佳网投交感(sympathetic)钟表组件,其包括座钟和至少一个手表,所述手表布置成存放在包含于座钟内的容座中并处于单一传输位置,所述交感组件包括在所述手表存放在所述容座中并处于所述传输位置时在所述座钟和每个手表之间的连接机构。
2.本发明涉及交感座钟和手表的非常特殊的领域,其中这些成对的钟表均包括用于计时的时基和用于显示钟表变量的显示装置;特别地,这些显示装置布置成允许用户同时观看座钟上的显示和手表上的显示。
背景技术:
3.自1800年以来,abraham-louis breguet已经设计了多款交感钟,其允许对交感钟专用的手表上发条、设置时间和调速,除了将手表放在座钟上以外,没有其他限制。
4.这三个功能(这是已知功能的最大数量)在由座钟的构造所限定的一个时间被同时执行,通常一天一次或两次。例如,george daniels在《宝玑的艺术》一书中描述的宝玑座钟n
°
128和相关手表n
°
5009就是这种情况。正是触发时间设置的时刻决定了时间设置的精度,这解释了以下事实:对于19世纪00年代的座钟,此功能一天仅执行一次或两次,而对于20世纪90年代的座钟,则每两小时执行一次。应该注意的是,除了在george daniels的分析中提到的分钟校正之外,手表没有小时校正,这迫使用户利用大约正负十五分钟的第一粗略时间设置进行初步调整,座钟在运转期间执行精细时间设置。
5.直到今天,这些仅有的功能类型还一直被应用于少数现存的交感座钟。
6.一些交感座钟恒对自动发条盒类型的手表的发条盒上条,并且在固定的时间每天执行一次或两次分钟的时间设置。在这种类型的座钟中,发条盒的卷绕/赋能必须迅速,以确保在合理的时间内对解绕的手表上条。
7.一些交感座钟确保对源自手表的时间设置的走时差的调整。
8.这些交感座钟的构造导致若干缺陷:
[0009]-如果手表持续放置在座钟上,它将被周期性地(每两小时、十二小时或每二十四小时)设置时间,这使时间设置机制不必要地产生偏差;
[0010]-如果手表持续放置在座钟上,并且如果上条是恒定和快速的,则在这种情况下需要的自动发条盒会经历显著的磨损;
[0011]-如果在用户将手表放在座钟上时手表是停止的,时间没有被设定,则需要等待下一次到达设置时间,时间设置不确定;
[0012]-如果在用户将手表放在座钟上时手表是停止的,并且预期上条随着时间设置而周期性进行,则上条不会在下一次到达设置时间之前发生,结果手表不工作,并且损失了正负十五分钟的先前时间调整;
[0013]-如果在用户将手表放在座钟上时手表是停止的,并且预期上条恒定在低速,则几天内都不会达到完全卷绕;
[0014]-如果在用户将手表放在座钟上时手表是停止的,并且预期上条恒定在高速,则不
会更快地达到完全卷绕,但是如果手表仍然存放在座钟上,这种高速将针对发条盒的滑动法兰功能并导致其过早磨损;
[0015]-仅保证分钟的时间设置功能以及上条功能,其他功能难以提供或增加。
技术实现要素:
[0016]
本发明提出通过克服已知技术的缺点来改善交感座钟和手表的功能性。
[0017]
本发明的目的是开发最佳网投由座钟和至少一个手表形成的组件,该组件:
[0018]-确保一旦手表被放置在座钟上就总是能对手表最佳上条;
[0019]-根据用户要求提供时间设置,例如在拿取手表佩戴之前;
[0020]-允许保证精确的时间设置,例如精确到秒;
[0021]-允许保证全时间设置,即使手表是停止的;
[0022]-允许传输比仅单一的分钟更多的信息,例如:秒、分钟、小时、日期、月相和/或年龄、星期几、星期、月份、年份、闰年、等等。
[0023]
所述座钟是真正的自动钟表,包括它自己的时基,以及它自己的时间显示和与它所包含的复杂功能相关的变量。
[0024]
为此,本发明涉及根据权利要求1的交感组件。
附图说明
[0025]
参考附图,通过阅读下面的详细描述,本发明的其他特征和优点将变得显而易见,其中:
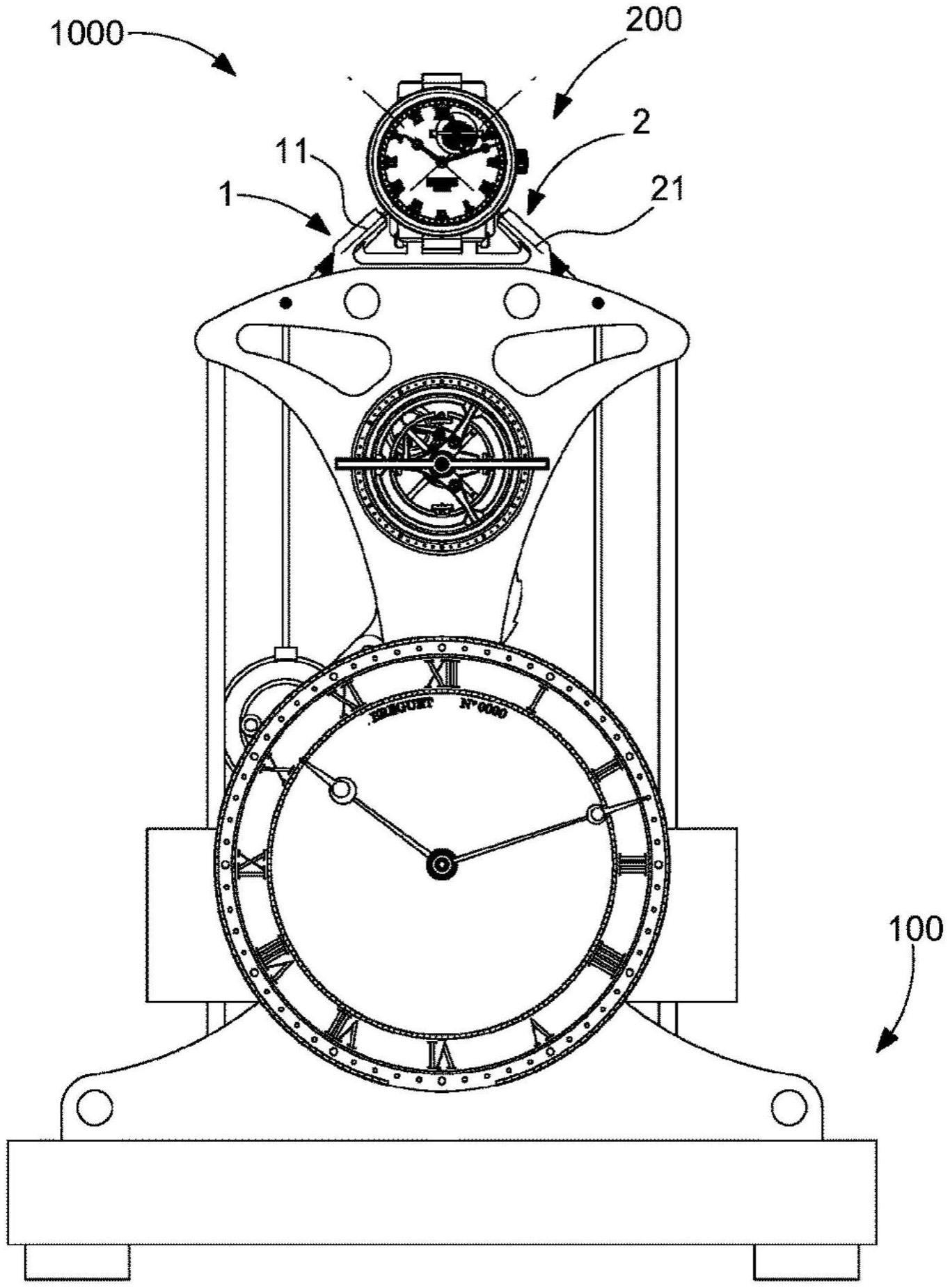
[0026]-图1示意性示出了最佳网投交感钟表组件的前视图,该交感钟表组件包括含有容座的交感座钟和放置在该容座中的至少一个交感手表,座钟和手表之间的连接沿着两条倾斜的传输线实现,每个传输线均包括座钟中的致动器,该致动器能够驱动手表中的接收器平移和/或旋转,然后该接收器充当内部致动器,以限定诸如启动/停止、时间设置或上条之类的功能的性质,或者向手表机构传输一定量的功率,例如根据旋转来驱动走时部件进行时间设置,或者通过平移、特别是往复运动形式的平移来对发条盒或特定机构赋能;
[0027]-图2示意性示出了图1中两个这样的传输线共面的细节,每个传输线包括由容纳在座钟中的下半轴和容纳在手表中的上半轴组成的轴,并且示出了用于驱动两个轴之一的控制装置;
[0028]-图3类似于图2,示出了具有两个平行轴的变型;
[0029]-图4是通过与槽缝配合的扁平区段,由下半轴驱动上半轴旋转的细节图;
[0030]-图5是通过与凹槽配合的弹簧夹(spring finger),由下半轴驱动上半轴平移的细节图;
[0031]-图6包括根据图3的具有两个上半轴的交感手表的仰视图和侧视图;
[0032]-图7示意性地在平面图中示出了第一致动器和第二推动型致动器的特定实施例的细节;
[0033]-图8至12示出了用于根据请求设置时间的在座钟上的数据采集,下面作为第六变型予以描述:
[0034]-图8类似于图1,显示了一个座钟,其运动由摆锤(weights)维持,并包括传统的前
部显示器;在摆锤的两个线性导向柱之间可以看到两个传动轴,每个传动轴被设置成驱动位于座钟上部、靠近用于接收手表的容座的致动器;图中最左边的传动轴是校准在座钟上读取的变量的差动机构的输出装置,在这种情况下用于手表的时间设置;在该图中可以看到,停止的手表上的小时显示是在10点10分,而座钟上的瞬时显示是在10点08分;
[0035]-图9是图8的上部部分在容座处的细节,以及座钟的两个致动器和手表的细节;该图叠加了手表的不同显示,并且仅示出了分钟显示器的变化:手表已放在容座上时在12点23分的初始显示用虚线表示;沿逆时针方向的返回箭头pesiam指示小时和分钟显示器被迫返回到预定基准位置,这里是12点00分;沿顺时针方向的基本步级的小箭头pe或pesam表示相继施加在手表分针上以接近座钟显示的两分钟步级的一部分;手表指示10点10分,因此它已经完成了四个基本的两分钟步级,并且准备好在座钟到达10点10分时根据座钟的命令立即恢复工作;
[0036]-图10示出座钟包括一个蜗形凸轮,其细节在图11中可见,它带有360个支靠部并且被座钟的机芯以12小时一转的速度驱动,触杆(feeler-spindle)行进通过该蜗形凸轮以读取其瞬时值。该触杆包括齿条,该齿条与布置成驱动第二致动器的齿轮系协作;更具体地,该齿轮系是差动机构的输入齿轮系,其一个输出装置是图中最左边的传动轴,并且其被布置成经由中间轮驱动第二致动器;
[0037]-类似于图10,图12示出了类似的且体积较小的实施例,其具有两个蜗形凸轮,一个蜗形凸轮具有少于12个支靠部以用于读取小时,另一个蜗形凸轮具有大于30个支靠部以用于读取两分钟步级;以同样的方式,由触杆行进通过每个蜗形凸轮,触杆的齿条构成了差速器的输入装置,其校正组件的差异;
[0038]-图13至18示出了显示器的基准时间设置变型的第七变型:
[0039]-图13示意性地在平面图中示出了交感手表的部分机构,其包括类似于计时码表锤件的锤件,该锤件具有其中该锤件被棘爪保持并被弹簧拉紧的赋能位置,以及其中该锤件停靠在第一心形小时凸轮的周边上从而迫使该锤件旋转到其最小半径的作用位置;此第一心形小时凸轮类似于计时机构中使用的凸轮,并且由小时轮承载;分钟显示器承载第二截顶心形分钟凸轮;跳簧(jumper)与和分钟显示器成一体的星形轮抵靠配合;
[0040]-图14是图13的细节图,示出了包括基本方形缺口的小时凸轮的细节,以及其下部为心脏形的分钟凸轮的细节;
[0041]-图15示意性地以穿过指针轴线的截面图示出了图13的机构,其包括显示齿轮系与最终齿轮系之间的离合联结器,该离合联结器包括摩擦弹簧并处于联结位置;
[0042]-图16与图15相似,示出处于脱离联结位置的相同机构;
[0043]-图17是图13和14的细节图,示出了双跳簧与分轮(cannon-pinion)的小齿轮的配合;
[0044]-图18示意性地以平面图示出了宝玑计时码表1050的联结机构,其包括夹持件,该夹持件的功能是在柱轮(即,导柱轮)的控制下确保联结和脱离联结,所述柱轮控制夹持臂的角度偏移以用于打开或关闭夹持件,从而实现根据图16和15的脱离联结或联结;
[0045]-图19至21示出了显示器的基准时间设置的第八变型:
[0046]-图19示意性地以平面图示出了交感手表的部分机构,其包括带有棘爪簧的棘爪、啮合在小时轮上并在顺时针方向上拨动小时轮并被复位弹簧驱动的齿条、齿条小齿轮(或
小时小齿轮)、由小时轮承载并包括开口的第一小时凸轮、以及由分钟显示运动件承载并包括棘齿开口或缺口的第二分钟凸轮,以及布置成与和分钟显示移动装置成一体的星形件配合的跳簧;
[0047]-图20示意性地以穿过指针轴线的截面图示出了图19的机构,其包括在显示齿轮系与最终齿轮系之间的离合联结器,该离合联结器包括摩擦弹簧并处于联结位置;
[0048]-图21类似于图20,显示了处于脱离联结位置的相同机构;
[0049]-图22至25示出了小时和分钟显示的逐步时间设置的第九变型:
[0050]-图22示意性地以平面图示出了交感手表的部分机构,其包括校正器、摇杆、跳簧和30个齿的星形轮,其中,该校正器与座钟的接口或允许传递往复运动的另一元件相对应,该摇杆能够以往复运动驱动分轮行进一个齿,该跳簧在驱动功能的间隔中保持分钟显示器的位置,该星形轮由分钟显示器承载并用于两分钟步级;
[0051]-图23示意性地以穿过指针轴线的截面图示出了图22的机构,其包括在显示齿轮系与最终齿轮系之间的离合联结器,该离合联结器包括摩擦弹簧并处于联结位置;
[0052]-图24类似于图23,显示了处于脱离联结位置的相同机构;
[0053]-图25是图22的细节图,示出了双跳簧与15齿分轮的小齿轮的配合,从而由于双跳簧和从摇杆臂偏移的两个支撑面的分级,获得了30个稳定位置;
[0054]-图26是流程图,显示了座钟和手表之间在12个小时内执行的一个周期,具有用户任选的时间设置请求dmah,以及上条r和时间设置动作mah;
[0055]-图27类似于图1,所示的座钟处于10点09分,其容座仍然是空的,并且手表显示在8点17分。这里的座钟包括三个致动器,第一致动器基本在手表的四点钟位置,第二致动器基本在手表的八点钟位置,第三致动器设置成与三点钟位置的手表的表冠配合,所有这些致动器围绕容座布置成星形,这里的容座由具有可枢转运动部分的拉伸器(stretcher)构成;
[0056]-图28类似于图27,示出插入其容座的手表;
[0057]-图29至33示出了主要的时间设置和上条步骤,每个步骤均包括同时视觉呈现左侧的手表显示和右侧的座钟显示:
[0058]-图29示出手表准备好被上条和设置时间,如它在图28中所呈现的;
[0059]-图30示出通过上条筒的旋转对手表进行上条,上条筒构成第三致动器并驱动手表的表冠,根据用户的请求dmah或者每12小时在固定时间周期性地对表冠上条相当于13小时的电池寿命;
[0060]-图31示出通过停止杆作用在谐振器的摆轮上来停止手表;座钟通过在四点钟位置处的第一致动器来控制手表谐振器的这种停止,指针与齿轮系的脱离联结,以及指针回到基准位置,这里选择为12点00分;
[0061]-图32示出通过跳变进行的手表指针的位移,其中每次跳变一个预定步级的值,在本例中选择为三分钟,直到指针进入座钟所显示的瞬时时间的位置,这里是10点12分,加上三分钟的步级,因此在10点15分的位置;在座钟的蜗形轮上读取该瞬时时间值以后,座钟通过所需的脉冲数将该瞬时时间值传输给手表,以控制指针的整体位移;此时手表准备好被重新启动,仅等待其停止杆的释放,这将由座钟控制;
[0062]-图33示出当座钟经过10点15分位置时,通过释放停止杆来启动手表,则手表以最
佳精度被设置时间,并准备好供用户佩戴;
[0063]-图34是图27和28的交感组件的透视图,其具有根据图12实施例的座钟;
[0064]-图35和36示意性地以透视图示出座钟的三个致动器与放置在形成容座的枢转式拉伸器上的手表的配合:四点钟处的第一推动式致动器、八点钟处的第二推动式致动器、以及三点钟处的用于驱动表冠的第三旋转式致动器;
[0065]-图37至45是流程图,包括根据下述九个变型的方法的基本操作,分别从第一变型到第九变型。
具体实施方式
[0066]
本发明涉及最佳网投交感钟表组件1000,其包括交感座钟100和至少一个交感手表200,所述交感座钟100包括座钟小时显示器104和座钟分钟显示器105,所述交感手表200包括手表小时显示器4和手表分钟显示器5,并且所述交感手表200被布置成设置在座钟所包含的、特别是在拉伸器670处的容座150中,并处于单一传输位置,该交感组件1000包括当每个手表200放置在容座150中并处于传输位置时,在该座钟100和该手表200之间的至少一个连接机构。
[0067]
根据本发明,所述至少一个连接机构包括至少两个不同的传输线,一个传输线用于选择要执行的功能或要调整的显示变量,另一个传输线用于传输功率或运动,或/和传递脉冲。
[0068]
更具体地,至少一个传输线,特别是每个传输线,包括轴。更具体地,该轴至少是旋转的。
[0069]
更具体地并且以非限制性的方式,这些轴中的至少一个或这些轴中的每一个类似于宝玑座钟n
°
128中的轴(g.daniels:宝玑的艺术:第277页)。
[0070]
至少一个这样的轴,更具体地每个轴,被分成在座钟100和相关的手表200之间的两个半轴,这两个半轴布置成:当手表200被放置在座钟100上的容座150中并处于传输位置时,这两个半轴以直接驱动方式,更具体地以同轴驱动方式,或者通过中间轮或齿轮系彼此驱动配合。这里不再详细描述这些半轴之间的传动,可以使用任何合适的驱动机构、齿部、花键、联结套筒、摩擦、等等。这些半轴可以端对端配合,或者彼此通过内部配合,或者彼此相切配合,或者通过中间轮或齿轮系配合、等等。
[0071]
这些至少两个传输线分配不同的功能。
[0072]
更具体地,以形状为至少两个轴的两个传输线来描述本发明:第一选择轴1和至少一个第二驱动轴2。当然,下面描述的一些功能可以被分割,并由其他附加的轴处理。
[0073]
第一选择轴1传递功能选择,其中一个功能是给手表200动力补给的中性/上条功能。这种传递特别为功能交替类型:中性-上条(neutral-winding)、日期、小时、分钟等,分布在360
°
上。第一选择轴1可与选择器、机器控制器或者计时手表或复杂功能手表的柱轮相当。
[0074]
第二驱动轴2确保从座钟100传递力,特别是转矩,以用于对手表200动力补给,特别是对发条盒上条,和/或确保向手表200传递调整值或设定值,其形式为基于座钟100给出的值的旋转角度,和/或向手表的机构施加脉冲。所述调整值或设定值可以对应于手表所显示的变量之一;它也可以是手表的谐振器的调整值,通过作用于标示器、游丝外桩、按压柔
性叶片、调节惯性等进行调整。
[0075]
第一轴1和第二轴2彼此不同(即彼此区分开),在最佳网投变型中,它们可以沿着平行轴线延伸,或者是重合的。
[0076]
在一个特定变型中,它们的轴线是共面的。
[0077]
在另一个特定变型中,它们的轴线相交。
[0078]
本发明允许通过至少两个单独的轴1和2来实现对手表200的调整,特别是时间设置,其中第一轴指示期望的校正类型,而其他轴指示校正值,后者中的至少一个轴用于手表的动力补给功能,特别是发条盒的重新卷绕。
[0079]
第一轴1和/或第二轴2能够以不同的方式移动,即平移和/或旋转。
[0080]
在最佳网投变型中,第一轴1和第二轴2可旋转运动。
[0081]
在最佳网投变型中,第一轴1和第二轴2可平移运动。
[0082]
在最佳网投变型中,第一轴1和第二轴2中的一个可旋转运动,另一个可平移运动。
[0083]
在最佳网投变型中,第一轴1和第二轴2中的一个可旋转和平移运动,另一个可平移运动。
[0084]
在最佳网投变型中,第一轴1和第二轴2中的一个可旋转和平移运动,另一个可旋转运动。
[0085]
在最佳网投变型中,第一轴1和第二轴2可旋转和平移运动。
[0086]
有利的是,设置是顺序的,并且从其中发生动力补给的中性位置开始,在该中性位置之后,优选地在一定的预定持续时间之后,或者随着用户的动作,为用于调整由手表显示的变量之一的至少一个基本序列,或者为触发特定功能。
[0087]
特别地,手表调整的设置是顺序进行的,每个变量均独立于其他变量进行调整。
[0088]
更具体地,这种顺序的时间设置是由专用机构来执行的,与手表的常规时间设置机构并行。
[0089]
更具体地,这种顺序的时间设置由座钟控制。特别地,在一个特定变型中,两个基本序列之间的持续时间是可调的。还更具体地,两个基本序列之间的每个持续时间都是可调的。
[0090]
有利的是,由座钟管理的限定基本序列的节奏的定时限定了用于启动由停止机构20先前保持停止的手表的触发时刻(或信号),该停止机构20尤其但不限于包括具有停止杆或类似部件的停秒机构(stop-second mechanism)25。以下描述的示例性实施例以非限制性的方式包括停止杆,该停止杆被布置成与谐振器10的惯性质量体15特别是摆轮协作,以实现其阻挡或释放。
[0091]
更具体地,所述调整设置或顺序的时间设置以非限制性方式校正以下指示的全部或部分:小时、分钟、日期、星期几、月份和/或任何其他指示。
[0092]
中性位置允许对手表动力补给或上条,所述上条由手表控制。
[0093]
所述第一轴1和第二轴2允许座钟100和手表200之间以下面描述的方式协作。
[0094]
第一轴1包括座钟100的第一下半轴11和手表200的第一上半轴12。
[0095]
当手表200缺席、也就是说没有放在座钟100上时,以及当座钟100没有承载任何手表200时,这两个半轴旨在共同构成第一轴1,也就是说,第一下半轴11和第一上半轴12均处于中性位置。
[0096]
类似地,第二轴2包括座钟100的第二下半轴21和手表200的第二上半轴22。
[0097]
当手表200放置在座钟100上时,一方面第一下半轴11和第一上半轴12以及另一方面第二下半轴21和第二上半轴22相匹配。当第一下半轴11和第一上半轴12处于中性位置时,所选择的功能是中性/上条,通过独立地将每个半轴定位(标定)在中性位置而有助于放置手表,这些半轴被自然地定位(标定)。
[0098]
座钟100布置成在手表200存在的情况下向第一轴1传递转矩。该第一轴1的旋转由调速机构调节,例如三问表调速器类型的调速机构。
[0099]
每个手表200设置成基于其例如通过动力储备机构根据限定的滞后所存储的动力水平、特别是根据特定情况下的发条盒的卷绕,释放或阻止第二轴2的旋转。在所述特定情况下,第二轴2的这种旋转被传递给发条盒的绕组并确保其卷绕。在此中性位置,手表200因此确保了在限定范围内其始终被赋能。
[0100]
座钟100包括至少一个控制装置300,该控制装置300设置成由用户操作,或者由座钟的时基控制,以旋转第一下半轴11,选择第一轴1的功能。
[0101]
当手表200被放置在座钟100上并且用户通过特别是存在于座钟100上的这种控制装置300(例如杆)请求时间设置时,手表200的调整设置或时间设置由座钟100控制的功能序列来执行。例如,调整到日期、小时、分钟和秒的值的瞬时值。根据用户的请求,开始了调整到当前值的序列,例如时间设置序列。每个序列以精确的节奏开始,这是由座钟100的时基定义的。
[0102]
当然,也可以在手表200上安装控制装置300,而不是将其安装在座钟100上,或者给座钟100和手表200都配备控制装置300。如果控制装置300仅在手表上,则这允许当手表200不在容座150中的传输位置时对该功能予以锁定。
[0103]
在交感组件1000被安排用于相继调节日期、小时、分钟和秒钟的值的特定情况下,几个基本序列彼此跟随。
[0104]
在第一基本序列期间,座钟100将第一轴1旋转到日期位置,并将第二轴2旋转对应于日期瞬时值的角度。手表200识别第一轴1到日期位置的旋转,致动停止杆(其停止谐振器和手表),将日期、小时、分钟和秒钟显示定位在零位置,并将第二轴2传送的值应用于日期显示。
[0105]
术语“显示器”在这里是指钟表业中已知的任何可移动的显示元件:指针、环、盘、光标、旗标、城市或时区显示器、月相显示器、闰年显示器、上午/下午显示器、白天/夜晚显示器、动力储备指示器、报时选择器、警报指示器、日历显示器、等等。
[0106]
在第一预定持续时间d1例如2分钟之后,座钟100触发第二基本序列。在该第二基本序列期间,座钟100将第一轴1旋转到小时位置,并将第二轴2旋转对应于时间瞬时值的角度。手表200识别第一轴1到小时位置的旋转,并将由第二轴2传送的值应用于手表200的小时显示器4。
[0107]
在第二预定持续时间d2例如2分钟之后,座钟100触发第三基本序列。在该第三基本序列期间,座钟100将第一轴1旋转到分钟位置,并将第二轴2旋转对应于瞬时分钟值的角度,该瞬时分钟值加到第三预定持续时间d3的值上,其将第三基本序列与下一个基本序列变化分开,所述下一个基本序列变化将是手表200的运行释放之前的最后设置。手表200识别第一轴1到分钟位置的旋转,并将第二轴2传递的值应用于手表的分钟显示器5。
[0108]
在第三预定持续时间d3例如2分钟之后,座钟100使第一轴1返回到中性/上条位置。手表200识别第一轴1到中性/上条位置的旋转,并释放停止杆,则手表200被调整并完全进行时间设置,并精确到秒启动。
[0109]
注意到这种构造有趣和有用的一面:在这个例子中,在6分钟或8分钟(如果第一序列在两分钟的短暂持续时间d0之后开始)内,处于解绕状态、被停止且未时间设置的存在于座钟上的手表200被上紧发条并且完全进行时间设置,包括日期。一个特别的选择是在座钟100上增加万年历,这样就可以根据用户在控制装置300上的请求来校正手表200的简单日期。
[0110]
更具体地,座钟100是机械机芯座钟。
[0111]
在最佳网投变型中,座钟100接收来自时基的信号,例如受控无线电信号、全球定位系统(gps)、来自电子钟的信号等,并且包括用于将指示瞬时时间的信号转换成机械部件的运动的装置,以用于将信息传输到手表200。
[0112]
在最佳网投变型中,座钟100和手表200之间传递的所有动力和运动都是机械的和/或磁性的。
[0113]
在最佳网投变型中,座钟100和手表200之间传递的所有动力和运动都是机械的。
[0114]
在最佳网投变型中,座钟100和手表200之间传递的所有动力和运动都是磁性的。
[0115]
在最佳网投变型中,不通过手表的上条和时间设置杆进行动力和/或运动传递。
[0116]
更具体地,在手表200包括上条和时间设置杆的情况下,包括在手表200中的每个半轴12、22与手表200的所述上条和时间设置杆是分离的/分立的。
[0117]
在最佳网投变型中,不通过手表的上条和时间设置杆进行动力传递。
[0118]
在最佳网投变型中,不通过手表的上条和时间设置杆进行运动传递。
[0119]
上条系统不需要滑动法兰发条盒,并防止了其磨损。当手表200被放置在座钟100上时以及必要时,在几分钟内以及在任意时间完成上条。
[0120]
由于所述调整设置、特别是时间设置是根据请求进行的,所以限制了当手表200长时间存放在座钟100上时机构的磨损。对于这些情况,可以通过座钟100的时基给予的控制,以规则的间隔触发时间设置,例如每周一次。
[0121]
本发明允许生产适合当前用户需求的交感座钟,其具有如上所述的有用且有趣的用途。这使得最佳网投已知有200年历史的产品得以真正进化。
[0122]
座钟100的走时差比手表200的走时差更稳定和更精确,它在手表没有被佩戴时保持手表准时,并根据请求校正手表。
[0123]
座钟100的强大电池寿命被提供给手表200:在手表没有被佩戴时,并且例如允许在理想的工作范围的一周维护和周末佩戴。
[0124]
下面描述根据本发明的交感钟表组件1000的不同变型以及不同的用途变型。
[0125]
这种交感组件1000包括交感座钟100和至少一个交感手表200,该交感手表200被布置成存放在座钟100的容座150中并处于单一传输位置。交感组件1000包括连接机构,该连接机构包括当手表200放置在容座150中并处于传输位置时,在座钟100和每个手表200之间的至少两个单独的传输线。
[0126]
交感座钟100被设置用于对至少一个交感手表200动力补给以及调节其显示和/或走时差,并且包括至少一个致动器,所述致动器用于执行对存放在容座150中并处于传输位
置的至少一个交感手表200的动力补给和/或显示和/或走时差调节。
[0127]
并且,座钟100包括座钟的全有或全无的(即存在或不存在的,all-or-nothing)至少一个第一致动器501,其可在休止位置和激活位置之间移动,以控制包括在手表200中的机构的激活或解除激活。并且座钟100包括座钟的至少一个其他致动器502;503,其被设置成向包含在手表200中的接收器施加一系列脉冲或传输机械转矩。
[0128]
更具体地,座钟的至少一个第一致动器501还被设置成在其休止位置和其激活位置之间向包括在手表200中的接收器施加一系列脉冲。
[0129]
更具体地,座钟的至少一个其他致动器502;503是全有或全无致动器,其可在休止位置和激活位置之间移动,以控制包括在手表200中的机构的激活或解除激活。
[0130]
更具体地,座钟的至少一个其他致动器502;503是第二致动器502,该第二致动器502被布置成将一系列脉冲施加给包括在手表200中的接收器。
[0131]
更具体地,座钟的至少一个其他致动器502;503是第三致动器503,该第三致动器503被布置成将机械转矩传递给包括在手表200中的接收器。
[0132]
更具体地,至少一个这样的第三致动器503能够在距存放在容座150中并处于单一传输位置的手表200一定距离处的脱离位置中脱离联结,并且能够在接合位置中与包括在手表200中的操作装置270或控制杆相联结。
[0133]
更具体地,至少一个这样的第三致动器503包括套管678,该套管678布置成在接合位置与包括在手表200中的操作装置270或控制杆配合。
[0134]
更具体地,座钟100包括第一动力存储装置691、693,特别是摆锤,其被设置为向包括在座钟100中的至少一个机芯180或900和/或座钟100专用的任何机构提供动力。
[0135]
更具体地,座钟100包括第二动力存储装置,其专用于将动力传输到存放在容座150中的至少一个手表200。更具体地,这些第二动力存储装置被布置成旋转驱动承载蜗轮684或小齿轮的传输轴683,以驱动小齿轮677或蜗轮,从而用于旋转第三致动器503。
[0136]
更具体地,座钟100被设置成向手表200连续地传输动力。
[0137]
更具体地,座钟100被设置成向手表200逐步地传输动力。
[0138]
更具体地,座钟100包括至少一个机芯180,该机芯180驱动至少一个蜗形凸轮601、610、620,该蜗形凸轮的角位置表征了钟表变量的瞬时值。并且座钟100包括至少一个触杆602、630、640,该触杆被布置成与蜗形凸轮601、610、620的外周抵靠配合,以便读取其瞬时值。每个触杆602、630、640包括齿条603、633、643,这些齿条布置成与用于驱动第二致动器的齿轮系协作;更具体地,该齿轮系是差动机构680的输入齿轮系,差动机构680的一个输出装置布置成驱动第二致动器502。
[0139]
更具体地,座钟100包括至少一个机电或电子机芯,其设置成控制输出运动件的运动,该输出运动件被设置成驱动第二致动器502。
[0140]
更具体地,第二致动器502包括凸轮684,该凸轮684具有多个斜面,这些斜面被布置成推动和拉动包括在该第二致动器502中的第二控制杆512,以便赋予第二控制杆512往复运动,用于对手表200进行时间设置,其中该第二控制杆512被第二弹性复位装置513朝向第二凸轮684复位。
[0141]
更具体地,第二致动器502包括曲柄和连杆,它们被布置成推动和拉动包括在该第二致动器502中的第二控制杆512,以便赋予第二控制杆512往复运动,用于对手表200进行
时间设置。在最佳网投变型中,该第二控制杆512由第二弹性复位装置513复位。
[0142]
更具体地,座钟100包括用于驱动座钟的第一致动器501的第一传输轴682,第一传输轴682设置成推动或拉动座钟的第一致动器501的第一杆511,以控制手表200的谐振器10或承载该谐振器的陀飞轮或卡罗素的停止或释放。更具体地,该第一传输轴682被布置用于驱动包含在座钟的该第一致动器501中的第一控制凸轮686。该第一控制凸轮686更具体地包括多个斜面。
[0143]
更具体地,座钟100包括用于定时到基准时间的装置,以及触发装置,在传输位置期间容座150被手表200占据的情况下,当座钟100所显示的时间变得等于该基准时间时,所述触发装置触发致动器501、502、503的一系列运动。
[0144]
更具体地,座钟100包括用于在执行动力补给和/或显示和/或走时差调节循环期间用户从容座150移除手表200时控制致动器501、502、503的再赋能的装置。
[0145]
更具体地,座钟100包括用于根据预定周期对存放在容座150中的手表200周期性地触发动力补给循环的装置,并且包括对于预定值的动力储备限制动力补给循环的装置,所述动力储备大于所述预定周期。
[0146]
更具体地,座钟100包括手动控制装置,该手动控制装置被设置成由用户操纵,以控制存放在容座150中处于传输位置的手表200的动力补给和/或显示和/或走时差调节循环的执行。
[0147]
更具体地,座钟100包括停止控制机构120,该停止控制机构120被布置成将由用户或由座钟100执行的逐步的时间设置控制转换成序列,该序列的第一步是用于控制机构20的动作,该机构20用于使包含在交感手表200中的显示器停止和/或脱离联结。
[0148]
更具体地,该停止控制机构120被布置成控制传输线的运动以识别时间设置动作,以及控制脉冲或转矩向包括在手表200中的停止机构20的传递。
[0149]
关于交感手表200,下面描述有利的非限制性类型:心形件和锤件的方案、棘爪和双凸轮的方案、以及棘爪、齿条和双凸轮的方案。
[0150]
这些手表具有共同的特征。
[0151]
在手表的全部两个方案中,交感手表200都包括至少一个动力储存发条盒,用于向该手表200中包括的至少一个谐振器10提供动力。手表200包括显示齿轮系和最终齿轮系。
[0152]
为了执行时间设置,有必要使用联结机构,或/和谐振器停止机构。为此,对于本说明书中给出的所有时间设置装置和方法,手表200均包括设置成停止谐振器10的操作的停止机构20,或者包括允许将显示器与最终齿轮系分离的联结机构,或者包括这种停止机构20和这种联结机构两者。
[0153]
所述离合联结器在打开时实际上允许显示器(特别是指针)独立于最终齿轮系旋转,无论是为了将这些显示器移位到预定的基准时间,还是为了朝瞬时精确时间移位(逐步的时间设置,或相对时间设置,或永久时间设置),或者移位一定偏移量(具有秒钟信号的方案),并且所述离合联结器在闭合时驱动显示器或指针。
[0154]
对于一些时间设置模式,例如永久时间设置,应用包括停秒机构25(其特别是具有停止杆)的停止机构20是必要的。它对于逐步时间设置模式或者对于相对时间设置模式构成优点,其中,在逐步时间设置模式中,停止机构20允许在0秒信号时启动;在相对时间设置模式中,用户可以看到谐振器10的惯性质量体15,特别是摆轮,在时间设置期间停止。在这
两种时间设置模式下,联结本身能够确保在摆轮不停止的情况下指针的启动,此时秒钟的显示是随机的:
±
30s。
[0155]
手表200通常包括至少一个小时显示器4和至少一个分钟显示器5,和/或至少一个任意其他显示器3。
[0156]
手表200包括能够被座钟100的全有或全无致动器激活或解除激活的至少一个内部机构,并且包括能够接收来自座钟100的致动器的一系列脉冲或机械转矩的至少一个接收器。
[0157]
在心形件和锤件的方案中,手表200包括重置机构500,其设置成将至少一个这样的显示器3、4、5返回到预定的基准位置。本说明书主要涉及基准位置在12点00分的例子;任何其他基准位置都是可能的,例如10点10分、等等。
[0158]
重置机构500被设置成将手表200的至少一个(更具体地但非限制性地,每个)显示器3;4;5返回到其基准位置。为此,重置机构500尤其包括用于至少一个显示器3、4、5的至少一个心形件401、702、703,该心形件与相关显示器3、4、5一体旋转,并且重置机构500包括至少一个锤件402、701,该锤件被布置成当它由于重置机构500的激活而被释放时,在弹簧的压力下与心形件401、702、703抵靠配合。在正常运行中,该锤件402、701被重置机构500复位,其趋向于将锤件移动远离心形件401、702、703。
[0159]
更具体地,手表200包括手表的第一致动器901,该第一致动器901设置成由座钟100致动,以控制至少一个锤件402、701的运动,从而针对每个被调整的钟表变量,通过锤件402、701与由相应显示器(特别是由分轮)承载的心形件401、702、703的配合,使得至少一个显示器3、4、5定位在预定基准位置。
[0160]
更具体地,锤件402或701是唯一的,并且对于包括在手表200中的所有心形件401、702、703是共用的,以用于调节各种相应手表变量的显示。
[0161]
更具体地,手表200包括这种停止机构20和手表的第一致动器901,该第一致动器901设置成由座钟100致动,以控制该停止机构20,以便阻止或释放其谐振器10和/或用于使手表200的显示器脱离联结的机构的运行。
[0162]
更具体地,手表的第一致动器901被布置成确保锤件402、701的再赋能。
[0163]
更具体地,该停止机构20包括停秒机构25,其包括停止杆,该停止杆布置成在阻挡位置与谐振器10的惯性质量体15抵靠配合,并且在谐振器10正常运行期间与惯性质量体15保持一定距离。
[0164]
更具体地,手表200包括至少一个操作装置270或控制杆,其能够在接合位置与座钟100的致动器配合。
[0165]
更具体地,手表200包括手动控制装置,该手动控制装置被设置成由用户操纵,以控制存放在容座150中处于传输位置的手表200的动力补给循环和/或显示调节和/或运行调节的执行,并且特别地,手表200包括用户可访问的至少一个控制装置300,用于控制周期性上条的执行,和/或用于控制自动时间设置的执行。
[0166]
更具体地,手表200包括手表的第二致动器902,该第二致动器902能够以往复运动方式操作,以用于以给定值的步级驱动手表200的分钟显示器5,并且通过该分钟显示器5间接驱动手表200的小时显示器4。
[0167]
手表200被设置用于分步级校正显示器,其中校正步长为预定值,例如两分钟。此
校正步长是小时的整约数:一分钟、两分钟、三分钟、四分钟、五分钟、六分钟、十分钟、十二分钟、十五分钟、二十分钟、三十分钟。手表200包括分轮或分针轮,由于具有30个齿、15个齿或包括数量对应于每小时选择的校正步级数量的齿的星形轮,所述分轮或分针轮被精确定位。
[0168]
手表200有利地包括至少一个第一上选择半轴11和至少一个第二上驱动半轴12,并且手表200被设置成在时间设置结束位置识别选择传输线或驱动传输线的运动,其中在时间设置结束位置,第一上半轴12被设置成致动停止机构20的停止杆,以释放谐振器10和/或用于使显示器脱离联结的机构,从而授权手表200的运行。
[0169]
更具体地,手表200包括至少一个安全机构,以防止过载的发条盒的发条发生断裂,该安全机构包括滑动法兰或动力储备测量机构,以防止对发条盒不必要的或破坏性的上条。
[0170]
更具体地,手表200包括显示器3、4、5,这些显示器被布置成沿顺时针或逆时针方向枢转,每个显示器与棘爪相关联,棘爪被布置成当从基准位置或从接近基准位置的准备位置切换时阻挡所考虑的显示器。
[0171]
更具体地,基准位置和/或准备位置以及棘爪的阻挡位置是可调节的。
[0172]
更具体地,手表200包括接口,该接口被设置成驱动至少一个这样的显示器3、4、5逆时针旋转,并且在这样的逆时针方向旋转期间卷绕发条盒。
[0173]
除了至少一个显示器3、4、5在逆时针方向上旋转之外,该接口有利地被设置成通过手表200中包括的最终齿轮系外部的棘爪机构来驱动用于对至少一个发条盒手动上条的齿轮系。
[0174]
在最佳网投变型中,手表200的最终齿轮系包括棘爪运动件,其布置成在逆时针旋转期间对至少一个发条盒上条。
[0175]
手表200有利地包括能够允许来自卷绕的转矩传递的时间设置摩擦件,或者包括联结机构而非时间设置摩擦件。
[0176]
更具体地,手表200包括至少一个分轮联结机构,其被设置用于使显示器3、4、5联结或脱离联结。具体而言,显示齿轮系705、707、708和最终齿轮系710之间的联结机构706包括摩擦弹簧709。
[0177]
更具体地,手表200包括布置成在顺时针或逆时针方向上枢转的分钟显示器5,并且包括棘爪,该棘爪被布置成在分钟显示器5切换到准备位置时被解锁,并且在基准位置阻挡分钟显示器。并且手表200有利地包括摩擦机构,该摩擦机构被布置成允许在逆时针旋转期间在该阻挡之后继续再赋能。
[0178]
手表200尤其包括锤件701,锤件701可在赋能位置和作用位置之间移动,在赋能位置,锤件701由棘爪保持并由弹簧张紧,在作用位置,锤件701被布置成停靠在由小时轮708承载的第一心形小时凸轮702的周边上,从而迫使第一心形小时凸轮702旋转到其最小半径。手表200还包括由分钟显示运动件承载的星形轮,其与跳簧704、7040配合,从而以规则的步级保持每个显示器位置。
[0179]
手表200包括第二截顶心形分钟凸轮703,其由分钟显示器705承载,以保证显示器位置位于精确的分钟处。
[0180]
在手表的任一方案中,交感组件1000均有利地包括用于控制显示器放置在基准位
置的控制机构。更具体地,该控制机构包括至少一个柱轮840。
[0181]
更具体地,手表200包括能够占据至少两个位置的功能控制器,第一位置对应于功能的启动,在该第一位置控制器被布置成控制最终齿轮系的脱离联结,并停止谐振器10的惯性质量体15,第二位置对应于功能的结束,在该第二位置控制器被布置成释放离合联结器和摆轮。
[0182]
在一个变型中,功能控制器能够占据第一位置和第二位置之间的中间位置,在该中间位置,控制器控制锤件的赋能。
[0183]
在一个替代方案中,功能控制器集成到手表200中,并且包括由接口控制的具有二到五个相继稳定位置的柱轮类型的旋转控制器,或者由接口控制的具有两个相继稳定位置的梭子(shuttle)类型的往复式控制器。
[0184]
在另一个替代方案中,功能控制器在手表200的外部,并且被容纳在座钟100中,并且手表200仅包括由接口控制并且默认返回到休止的往复凸轮,其包括稳定休止位置以及一个到三个受控位置。
[0185]
在最佳网投变型中,功能控制器是三位置柱轮类型的,被设置成控制三个摇杆,这些摇杆被设置成控制离合联结器、停止杆和一个或多个锤件,或者是这些机构的一部分,这些摇杆被设置成搁置在柱轮的柱上,以便在需要时被致动,并且摇杆的不同位置是初始和最终位置、返回到基准时间(例如12点00分)的位置、以及时间设置位置,在初始和最终位置,离合联结器起作用、停止杆不起作用并且锤件被赋能,在该返回到基准时间(例如12点00分)的位置,离合联结器不起作用、停止杆起作用并且锤件被释放,在该时间设置位置,离合联结器不起作用、停止杆起作用并且锤件被赋能。
[0186]
在一个变型中,功能控制器包括三级蜗形轮,其位于座钟100中,并被设置成通过交感接口控制手表200中的往复凸轮,以控制离合联结器、停止杆和一个或多个锤件,其不同位置是初始和最终位置、返回到基准时间(例如12点00分)的位置、以及时间设置位置,在初始和最终位置,离合联结器起作用、停止杆不起作用并且锤件被赋能,在该返回到基准时间(例如12点00分)的位置,离合联结器不起作用、停止杆起作用并且锤件被释放,在该时间设置位置,离合联结器不起作用、停止杆起作用并且锤件被赋能。
[0187]
通过在座钟的作用下将显示器旋转到基准位置,可以使用最佳网投手表变型进行上条。此手表包括棘爪和至少两个凸轮。
[0188]
在此变型中,手表200包括用于向包括在手表200中的至少一个谐振器10提供动力的至少一个动力储存发条盒、以及显示齿轮系和最终齿轮系。
[0189]
手表200包括设置成停止谐振器10的操作的停止机构20,或者允许显示器与最终齿轮系分离的联结机构,或者这种停止机构20和这种联结离合器机构两者。
[0190]
手表200包括至少一个显示器3;4;5,特别是至少一个小时显示器4和一个分钟显示器5。
[0191]
手表200包括能够从座钟100的致动器接收一系列脉冲或机械转矩的至少一个接收器。
[0192]
手表200包括能够沿逆时针方向驱动显示器的传输线、棘爪801、以及由小时轮808承载的至少一个第一小时凸轮802,所述第一小时凸轮802包括对应于显示器的基准位置的棘齿开口8030或缺口831。
[0193]
更具体地,手表200包括由小时轮808承载的并包括开口8020的第一小时凸轮802;由分钟显示运动件805承载的并包括棘齿开口8030或缺口831的第二分钟凸轮803;跳簧804,其被布置成与分钟显示运动件805承载的星形轮协作,以用于根据预定的规则步级保持每个显示器位置。
[0194]
更具体地,手表200包括接口,其被设置成驱动至少一个显示器3;4;5沿逆时针方向旋转,并以逆时针方向的旋转来卷绕发条盒。手表200包括最终齿轮系,该最终齿轮系包括棘爪运动件,其被设置成允许在逆时针旋转过程中对至少一个发条盒上条。
[0195]
更具体地,除了至少一个显示器3、4、5的逆时针旋转之外,该接口被设置成通过包括在手表200中的最终齿轮系外部的棘爪机构来驱动至少一个发条盒的手动上条齿轮系。
[0196]
更具体地,手表200包括能够允许来自卷绕的转矩传递的时间设置摩擦件,或者包括联结机构而非时间设置摩擦件。
[0197]
手表的另最佳网投变型包括棘爪、齿条和至少两个凸轮。在这种棘爪、齿条和双凸轮方案中,手表200包括棘爪801、与小时轮808啮合的齿条823、以及小时齿条小齿轮824,其中,齿条823被设置成在顺时针方向拨动小时轮808,并且由复位弹簧825驱动。手表200包括两个凸轮:由小时轮808承载并包括开口8020的至少一个第一小时凸轮802;和由分钟显示运动件805承载并包括棘齿开口8030或缺口831的第二分钟凸轮803。手表200包括跳簧804,跳簧804被设置成与分钟显示运动件805承载的星形轮配合,以用于根据预定的规则步级保持每个显示器位置。
[0198]
齿条小齿轮824被布置成在手表200不与座钟100配合时的手表200的正常操作期间,对齿条823驱动和赋能,齿条823在每个齿处被拨动。
[0199]
手表200包括在显示齿轮系805、807、808和最终齿轮系810之间的联结机构806。
[0200]
交感组件1000包括在座钟100和手表200之间的接口,该接口被布置成通过将联结机构806朝向其脱离联结位置致动来使联结机构806脱离联结,这允许齿条823在逆时针方向上驱动手表200的小时显示和分钟显示齿轮系,其中回转次数视需要而定,直至棘爪801遇到第一小时凸轮802的开口8020,这对应于在与手表200的显示器3、4、5的预定基准位置对应的基准时间之前的分钟数,在棘爪801能够按压在第二分钟凸轮803上以便旋转对应于到达该基准时间之前的最后分钟数并且直至在棘齿开口8030中阻挡第二分钟凸轮803的时刻,该阻挡对应于基准显示位置。
[0201]
由座钟100控制的时间设置机构被设置成通过对齿条801再赋能来将手表200的显示器4、5的时间沿顺时针方向朝向精确时间设置。
[0202]
座钟100和手表200之间的接口还被设置成通过联结该联结机构806来对齿条801再赋能或完成齿条801的再赋能,从而将最终齿轮系与显示齿轮系重新连接。
[0203]
跳簧804和星形轮之间的配合允许在每个步级保持显示器,并且允许对齿条801再赋能而不丧失显示。
[0204]
由分钟显示器5承载的星形轮或者是与简单的单齿跳簧804配合的30齿星形轮,或者是与包括两个齿的双跳簧8040的单个齿同时配合的15齿分钟分轮的小齿轮,或者包括一定数量的齿,其对应于一小时内包含的整数个预定步级。
[0205]
联结机构806有利地包括摩擦弹簧809。
[0206]
更具体地说,该联结机构806是计时器联结机构,其包括夹持件821,夹持件821的
功能是在控制夹持件的臂821、822的角度偏离的柱轮840的控制下确保联结和脱离联结,以便分别对应于脱离联结或联结来打开或闭合夹持件。
[0207]
与心形件和锤件的方案一样,交感组件1000包括控制机构,该控制机构在手表200的内部或外部,用于控制显示器在基准位置的设置。
[0208]
更具体地,该功能控制器能够占据至少两个位置,第一位置对应于功能的启动,在该第一位置控制器被布置成控制最终齿轮系的脱离联结,并停止谐振器的摆轮,第二位置对应于功能的结束,在该第二位置控制器被布置成释放联结离合器和摆轮。
[0209]
更具体地,功能控制器被集成到手表200中,并且包括由接口控制的具有二到五个相继稳定位置的柱轮840类型的旋转控制器,或者由接口控制的具有两个相继稳定位置的梭子类型的往复式控制器。
[0210]
更具体地,功能控制器在手表200的外部,并且容纳在座钟100中,并且手表200仅包括由接口控制并且默认返回休止的往复凸轮,并且包括稳定休止位置以及一个至三个受控位置。
[0211]
更具体地,功能控制器包括蜗形轮和两位置凸轮。
[0212]
在称为逐步时间设置的第一特定变型中,交感组件1000被布置成允许进行逐步时间设置。更具体地,包括交感座钟100和至少一个相关联的交感手表200的交感组件1000被设计成执行以下功能:
[0213]-当将停止的手表放在座钟上时,启动停止的手表;
[0214]-给手表上条,保证在手表从座钟上取下时具有最少12小时的电池寿命;
[0215]-当手表在座钟上时,保持手表运转;
[0216]-当手表放在座钟上时或在请求时将手表的时间设置在正负15秒内;
[0217]-只要手表在座钟上,就保持手表准时;
[0218]-能够停用该功能以便可以将停止的手表存放在座钟上。
[0219]
在此第一变型中,逐步时间设置可以应用户在控制装置300处的请求来完成,和/或自动完成,也就是说由座钟100控制,特别是由连接到座钟100的显示器的旋转的机构控制,该座钟100的显示器特别地并且以非限制性的方式为座钟的小时显示器104和座钟的分钟显示器105。由座钟100执行的控制可以是周期性的,或者连接到由用户设定的辅助机构,其被称为报警类型机构,类似于报警机构;由座钟100执行的这种控制仅在手表200存在于容座150中处于传输位置时执行。
[0220]
如果手表200没有完全解绕,那么除了演示目的之外,用户对时间设置也感兴趣。此外,时间设置通常是接连在手表200的再赋能之后,或者更一般地在手表200的动力补给之后。通过对任何动力注入或补给分别使用术语“赋能(coiling)”或“再赋能(recoiling)”,简化了本说明书。
[0221]
手表200通常包括显示器3、4、5,特别地并且以非限制性的方式,包括手表的小时显示器4和手表的分钟显示器5。附图示出了其中这些显示器为指针的非限制性变型。
[0222]
更具体地说,由座钟100执行的控制,或者用户在控制装置300上的动作,具有将传输线之一定位在对应于时间设置的位置的第一效果。然后,传输线之一能够向手表200内部的时间设置机构赋予精确到达当前时间显示所需的一个或多个运动。
[0223]
下面在一个非限制性实施例中描述本发明,其中座钟和手表之间的传输线之一包
括座钟的第一致动器501,该第一致动器501被设置成与用于控制手表的启动或停止的手表的第一致动器901协作,并且这些传输线中的另一个包括座钟的第二致动器502,该第二致动器502被设置成与手表的第二致动器902协作,该第二致动器特别是推动件等,该第二致动器递增地提供定位运动。在另一个实施例中,这些推动件可以组合在一起。在另一个实施例中,另一条传输线包括座钟的第三致动器503,其被设置成与手表的致动器之一协作。
[0224]
手表200包括谐振器10,谐振器10包括至少一个惯性质量体15;本说明书涉及游丝型谐振器的最常见情况,其中惯性质量体15是摆轮。
[0225]
手表200配备有停止机构20,该停止机构20被设计成特别地通过将臂或板簧或另一个致动器按压在惯性质量体15上或谐振器的合适元件上来停止谐振器10的操作。更具体地,该停止机构20是包括停止杆的停秒机构25。
[0226]
座钟100包括停止控制机构120,该停止控制机构120被布置成将由用户或座钟100执行的逐步时间设置控制转换成一个序列,该序列的第一步是手表200的停止机构20的控制动作。
[0227]
座钟100的停止控制机构120被设置成控制传输线之一的运动以识别时间设置动作,以及控制脉冲或转矩向手表200的停止机构20的传递。
[0228]
所述时间设置序列如下:
[0229]-为了设置时间,使谐振器10停止,特别是使手表200的摆轮15停止,手表200的显示器立即返回到基准位置,特别是12点00分;
[0230]-然后,手表200的小时显示器4和分钟显示器5在相继的步骤中到达对应于瞬时精确时间的重启显示位置,该位置增加了由该机构施加的至少一个额外步级(特别是两分钟步级)的值;
[0231]-当接下来的两分钟过去时,也就是说,在对应于刚刚到达的重启显示位置的时刻,手表的谐振器10,特别是摆轮15,被手表200的停止机构20(特别是该停秒机构25)释放。
[0232]
为此目的,手表200识别在时间设置位置座钟100和手表200之间的传输线的运动,手表的第一致动器901(特别是推动件等)致动停秒机构25的停止杆,其停止谐振器10和手表200。手表的该第一致动器901有利地也是用于控制至少一个锤件或类似部件的机构,并且通过对于每个被调整的钟表变量使锤件与由分轮承载的心形件协作,使得手表200的小时显示器4和分钟显示器5定位在基准位置。
[0233]
因此,更具体地说,所述逐步时间设置包括一系列步级,这里用非限制性的步级数值来描述:
[0234]
在用户在控制装置300处给出的或由座钟100本身给出的时间设置命令期间,控制装置300或包含在座钟100中的钟表机芯900激活停止控制机构120,该停止控制机构120通过第一推动件901立即控制手表200的停止机构20。
[0235]
然后谐振器10停止,在这里所示的特定情况下,惯性质量体15停止。
[0236]
手表200包括至少一个显示器3、4、5;更具体地并且以非限制性的方式,本说明书涉及手表的小时显示器4和手表的分钟显示器5的设置。
[0237]
手表200包括重置机构500,其被设置成将手表的至少一个显示器3、4、5,特别是手表的小时显示器4和手表的分钟显示器5返回到基准位置,特别是例如在基准位置处的位置,特别是12时00分,也就是说十二点零分,或者,如图27至33所示,位置10时10分,也就是
说十点十分,或者任何其他值。除非另有说明,否则在本说明书中,基准位置是12时00分(十二点零分)的所述基准位置。
[0238]
更具体地,该重置机构500被设计成将手表的每个显示器3、4、5返回到其基准位置。
[0239]
在一个非限制性实施例中,对于每个显示器3、4、5,该重置机构500包括与该显示器3、4、5一体旋转的心形件401、702、703,并且该重置机构500包括至少一个锤件402、701,该锤件被布置成在重置机构500激活期间与该心形件401、702、703抵靠配合;优选地,该锤件402、701由锤件弹簧403返回,在正常操作中,锤件弹簧403倾向于使锤件402、701移动离开心形件401、702、703。
[0240]
在一个特定的变型中,锤件402、701是唯一的,并且对于包括在手表200中的用于待调整的不同钟表变量的所有心形件401、702、703是共用的。
[0241]
因此,在手表200停止的同时,停止机构20通过激活其重置机构500来控制其显示器的重置,以使每个显示器3、4、5返回到其基准位置。
[0242]
因此,手表200的每个显示器3、4、5即刻占据基准显示位置,例如十二点零分位置。
[0243]
然后另一传输线由座钟驱动,给手表施加特定的显示;这种驱动不是连续进行,而是分步进行。该另一传输线包括手表的第二致动器902,其在这里以往复运动方式操作;这个非限制性实施例是控制手表时间的可行方案之一。
[0244]
随后,通过手表的第二致动器902,座钟100以具有给定值(例如两分钟)的多个步级驱动手表的分钟显示器5,并因此通过手表的分钟显示器5间接地驱动手表的小时显示器4,直到手表上的显示匹配对应于瞬时精确时间的重新启动显示位置,该瞬时精确时间是座钟100上可见的瞬时显示的值加上至少一个额外步级,因此这里是加上两分钟。
[0245]
此机构的工作方式类似于日期校正器:手表200具有连接到分钟运动件的校正器,座钟100致动手表的第二致动器902,该第二致动器902在该校正器上按压达到瞬时时间所需的次数,该瞬时时间增加了步级值,这里是两分钟。这种线性运动类似于自行车打气筒的操作。座钟上的基准点的实现类似于由三问表机构应要求执行的基准点,并且感测通常包括在座钟中的小时蜗形轮和分钟蜗形轮。
[0246]
所述两分钟步级是一个非限制性示例,并且在此示例中,对于两分钟步级,要采取的步级数量在0到359个步级(60/2*12)之间可变。在这个阶段,由于星形轮(特别是但不限于具有30个齿),手表的分轮或分钟轮被精确定位;下面将看到15齿星形轮的有利情况。更一般地,手表200的分轮或分钟轮由与分轮或分钟轮成一体的星形轮和具有一个或多个齿的跳簧的组合精确定位,该星形轮的齿数和该跳簧的齿数一起限定了预定步级的值。
[0247]
手表的第一致动器901的操作可以用来确保锤件402、701的再赋能。
[0248]
随后,座钟100等待接下来通过下面的两分钟,以便在对应于先前设定的重启显示位置的此精确时刻,通过第一推动件901释放停止杆,从而允许手表在精确的时间运行。感谢秒钟停止件,此时间设置非常精准。
[0249]
实际上,这种通过下面的两分钟具有以下效果:改变停止控制机构120的状态、控制所述启动/停止控制传输线的运动、识别时间设置结束动作、以及控制脉冲或转矩到手表200的停止机构20的传递。
[0250]
在交感座钟100包括第一选择轴1和至少一个第二驱动轴2的实施例中,手表200识
别在时间设置结束位置的传输线之一的运动,第一上半轴12重新致动停止机构20的停止杆,这会释放谐振器10和手表200,其运行瞬间恢复。
[0251]
简而言之,通过第一接口,座钟100停止手表200的惯性质量体15,特别是摆轮,这特别是通过秒钟停止杆件机构25实现。
[0252]
随后,通过第二机构,座钟100步进地(这里,以2分钟步级)驱动手表200的手表分钟显示器5,并且借此驱动手表200的手表小时显示器4,直到这些显示器到达并且共同指示瞬时精确时间加上两分钟。
[0253]
随后,座钟100等待接下来通过下面的两分钟,以释放停止杆,从而允许手表200准时运行。
[0254]
因此,手表的时间设置非常精确。
[0255]
简而言之,这种交感手表200的逐步时间设置方法包括下面描述的不同步骤。
[0256]
1a:确定在第一次赋能之后在座钟100被移除的情况下手表200在所有时刻必须具有的预定电池寿命的值。
[0257]
1b:确定预定的时间设置步级值。
[0258]
1c:为手表200的显示器3、4、5定义基准位置。
[0259]
1d:连接机构配备至少两条不同的传输线,一条用于动力或运动传递,另一条用于选择要执行的功能或要调整的显示变量,每条传输线包括与座钟100中的座钟致动器和手表200中的至少一个手表致动器的接口。
[0260]
1e:将手表200放置在容座150中,并处于传输位置,该传输位置允许座钟100检测手表200的存在,并且如果手表200被放置在座钟100上时是停止的,则允许座钟100执行手表200的第一次赋能以触发手表200的启动。
[0261]
1f:座钟100对手表200赋能,以便在从座钟100取下手表200时确保手表200的预定电池寿命。
[0262]
1g:当手表200被放置在容座150上时,或者可选地在座钟100上的预定时间,或者根据用户作用于包括在座钟100或手表200中的控制装置300而提出的请求,或者根据包括在座钟100中的钟表机芯900的控制,座钟100执行手表200的时间设置。
[0263]
1h:座钟100将一个传输线定位在对应于时间设置的位置,并且以相继的步级(每个均具有此预定步级的值)致动能够将精确到达当前时间的显示所需的任何运动赋予手表200的内部时间设置机构的一个传输线。
[0264]
1i:只要手表200在座钟100上、在容座150中、位于传输位置,则座钟100就保持手表200工作。
[0265]
1j:更具体地,座钟100和/或手表200配备控制装置,该控制装置被设置成允许用户解除激活时间设置功能和赋能功能,以用于将停止的手表存放在座钟上。
[0266]
1k:更具体地,时间设置由周期性机构逐步控制,该周期性机构连接到座钟100的显示器的旋转,或者连接到由用户设置的报警器或报警器类型机构。
[0267]
1l:更具体地,交感组件1000配备有第一传输线,该第一传输线包括座钟的第一致动器501,该第一致动器501被布置成与手表的第一致动器901协作,该第一致动器901用于控制手表的启动或停止,并且交感组件1000配备有第二传输线,该第二传输线包括座钟的第二致动器502,该第二致动器502被布置成与手表的第二致动器902协作,该第二致动器
902递增地提供定位运动。
[0268]
1m:更具体地,交感组件1000配备有第一传输线,其包括座钟的第一致动器501,该第一致动器501被布置成与手表的第一致动器901协作,该第一致动器901用于在不停止谐振器的情况下控制手表200的显示器相对于谐振器的联结或脱离联结,并且交感组件1000配备有第二传输线,其包括座钟的第二致动器502,该第二致动器502被布置成与手表的第二致动器902协作,该第二致动器902递增地提供定位运动。
[0269]
1n:更具体地,制造单个致动器,其构成手表的第一致动器901和手表的第二致动器902两者。
[0270]
1o:更具体地,手表200配备有停止机构20,并且座钟100配备有停止控制机构120,该停止控制机构120被设置成将由用户或由座钟100执行的逐步时间设置控制转换成序列,该序列的第一步是手表200的停止机构20的控制动作,座钟100的停止控制机构120被设置成控制传输线的运动以识别时间设置动作,以及控制脉冲或转矩向手表200的停止机构20的传递。
[0271]
1p:更具体地,为了在相继步骤中致动通向手表200的内部时间设置机构的传输线,执行时间设置序列,根据该序列,座钟100的停止控制机构120控制手表200的停止机构20在设置时间之前停止谐振器10,并控制手表200配备的重置机构500以使手表200的显示器3、4;5立即返回它们的基准位置,然后在相继的步骤中控制显示器3、4、5前进到重启显示位置,该重启显示位置对应于在座钟100上可读的精确瞬时时间加上对应于由该机构施加的一个预定步级或整数个预定步级的值。并且,当座钟100通过对应于重启显示位置的时间时,会改变停止控制机构120的状态,并且控制启动/停止控制传输线的运动,以识别时间结束设置动作,并且控制脉冲或转矩到手表200的停止机构20的传递,以释放停止机构20并重启谐振器10。
[0272]
1q:更具体地,为了执行重置,手表200识别座钟100和手表200之间的传输线在时间设置位置的运动,并且手表的第一致动器901致动停止机构20,其停止谐振器10和手表200,手表的第一致动器901构成用于至少一个锤件的控制机构,以便对于每个被调整的钟表变量,通过锤件402;701与心形件401、702、703的配合,使得至少一个小时显示器4定位,其中心形件401、702、703与显示器一体旋转并由分轮承载。
[0273]
1r:更具体地,为了执行时间设置序列,座钟100驱动另一条传输线以在手表200上施加特定的显示,该另一条传输线包括以往复运动方式操作的手表的第二致动器902,并且通过手表的第二致动器902,座钟100以整数个预定步级驱动手表200的手表分钟显示器5,并且通过手表分钟显示器5驱动手表200的手表小时显示器4,直到手表200上的显示对应于重启显示位置。
[0274]
1s:更具体地,为了执行时间设置序列,座钟100配备有用于通过机芯900驱动小时和分钟蜗形轮的机构,以及在被请求时如三问表机构那样用于感测瞬时小时和分钟的机构。
[0275]
1t:更具体地,为了执行时间设置序列,座钟100配备有通过机芯900驱动单个分钟蜗形轮的驱动机构,以及在被请求时如三问表机构那样感测瞬时分钟的机构,其中,该单个分钟蜗形轮以十二小时一转或二十四小时一转的速度被驱动,包括对应于所选分钟步级乘以12或24的步级数量。
[0276]
1u:更具体地,选择两分钟的预定步级,并且要采取的步级数量在0到359个步级之间可变,在此期间,由于30齿或15齿的星形轮,手表200的分轮或分钟轮被精确定位,该星形轮可以由分轮本身形成。
[0277]
1v:更具体地,手表200的分轮或分钟轮通过与分轮或分钟轮成一体的星形轮和具有一个或多个齿的跳簧的组合来精确定位,星形轮的齿数和跳簧的齿数一起限定了预定步级的值。
[0278]
1w:更具体地,采用包括第一选择轴1和至少一个第二驱动轴2的座钟100,并且手表200被布置成在时间结束设定位置识别传输线之一的运动,并且包括控制停止机构20以释放谐振器10的第一上半轴12。
[0279]
第二种变型,称为周期性脉冲上条并且处于时间设置功能,其涉及当手表200在座钟100的容座150中时手表200的周期性上条,其赋能值对应于一个周期的持续时间加上安全持续时间。
[0280]
总体目标与第最佳网投分步时间设置变型相同。
[0281]
在一个有利的实施例中,当应用户的请求或者应座钟100的时基的请求而在手表上设置时间时,还触发与在每个周期执行的上条相同的上条,以确保在设置时间后手表200的操作。则在时间设置操作之前执行这种上条。
[0282]
这个原理要求在手表200处存在安全机构,例如滑动法兰类型的发条盒,以防止发条盒发条在过载时断裂。在一个更复杂的实施例中,动力储备测量机构允许防止不必要的或破坏性的发条盒上条。
[0283]
例如,并且以非限制性的方式,对于大于周期性上条的周期的赋能值,例如十三小时的赋能值,以十二小时的周期进行周期性上条,因此一天两次,以便具有十三小时的电池寿命。
[0284]
周期性类型上条的执行可以根据用户在控制装置300处的请求完成,和/或自动完成,也就是说由座钟100控制,特别是由连接到座钟100的显示器104、105的旋转的机构控制。由座钟100执行的控制可以是周期性的,或者连接到由用户设置的辅助机构、警报器机构或警报器类型机构;由座钟100执行的这种控制仅在手表200存在于容座150中处于传输位置时执行。
[0285]
周期性类型的上条的执行可以由用户在时间设置请求期间的动作触发,或者由针对同一对象的座钟100本身的控制触发。
[0286]
更具体地,在本示例中,通过座钟和手表之间的传输线之一或者通过诸如表冠之类的第三接口,座钟100驱动手表200的上条齿轮系旋转相当于十三小时电池寿命的转数。此电池寿命允许手表200在用户立即佩戴其手表的情况下运行,只要所述手表配备有确保额外赋能的自动上条机构,即使该手表200在时间设置请求之前被事先解绕。
[0287]
如果手表200是自动的,它将在被佩戴的同时继续其赋能。
[0288]
如果手表200保持位于座钟100上的其容座150中,则它继续运行,直到下一个周期性上条,在这个有利的例子中是在十二小时之后。
[0289]
应指出,在极端情况下,上条水平可能会下降从而使计时性劣化,但如果上条周期与时间设置周期相联结,则这种损失对用户无害。
[0290]
还应指出的是,在大约50个循环之后,将达到手表的最大赋能,例如60小时,因此
手表将在48-60小时的赋能之间连续运行,并且发条盒法兰被导致每天两小时的滑动,这比自动手表的正常磨损低得多,并且不会产生机构的过度磨损。
[0291]
这种周期性上条非常简单,保留了手表的动力储存机构,同时确保了用户受益。
[0292]
简而言之,通过周期性脉冲对这种交感手表200进行上条的方法包括下述不同步骤。
[0293]
2a:确定赋能周期,并且当手表在容座150中时,以等于赋能周期的周期执行手表200的周期性上条,其中赋能值对应于赋能周期的持续时间加上安全持续时间。
[0294]
2b:更具体地,在每个赋能周期、或者在座钟100对手表200的时间设置操作期间、或者通过用户对控制装置300的操作而发出请求时、或者在包含于座钟100中的钟表机芯900的控制下,执行与周期性上条相同的上条,以确保在时间设置操作之后手表200能继续工作,所述上条是在时间设置操作之前进行。
[0295]
2c:更具体地,只要手表200在座钟100上位于容座150中且处于传输位置,座钟100就保持手表200工作。
[0296]
2d:座钟100和/或手表200配备有控制装置,该控制装置被设置成允许用户停用时间设置功能和赋能功能,以用于将停止的手表存放在座钟上。
[0297]
2e:手表200配备有安全机构、滑动法兰发条盒或动力储备测量机构,以防止过载的发条盒发条断裂,并防止不必要的或有害的发条盒上条。
[0298]
特别是,选择十二小时的赋能周期。
[0299]
2f:更具体地,选择13小时的赋能值,其包括12小时的赋能周期和1小时的安全持续时间,以便设置总共13小时的电池寿命。
[0300]
2g:更具体地,选择周期性类型的自动上条,其由座钟100控制,或者由连接到座钟100的显示器的旋转的机构周期性地控制,或者在由用户在报警器机构或报警器类型机构中定义的时刻由用户调节的辅助机构的触发控制。
[0301]
2h:更具体地,周期性类型的上条由用户在时间设置请求期间的动作触发,或者由座钟100的时间设置控制来触发。
[0302]
2i:座钟100通过传输线之一或通过控制包含在手表200中的表冠的旋转的第三接口,以足以构成等于赋能周期和安全持续时间之和的赋能值的转数驱动手表200的上条齿轮系,从而即使用户立即佩戴手表200,并且即使手表200在时间设置请求之前事先被解绕,仍允许手表200立即运行。
[0303]
2j:更具体地,赋能周期被减少到手表200的计时性在此发生劣化的阈值,并且上条周期与时间设置周期相结合,使得计时性能的损失不会对用户有害。
[0304]
更具体地,在座钟100和手表200之间生成包括至少两条不同传输线的连接机构。
[0305]
更具体地,该交感组件1000形成为具有手表200,该手表200包括至少一个谐振器10、显示齿轮系和最终齿轮系,以及设置成停止谐振器10的操作的停止机构20,或者允许显示器与最终齿轮系分离的联结机构,或者这种停止机构20和这种联结机构两者,并且手表200包括至少一个小时显示器4和至少一个分钟显示器5。
[0306]
称为相对时间设置的第三种变型涉及根据请求执行时间设置,并且由座钟100周期性地自动控制,例如一天两次。
[0307]
总体目标与分步时间设置的第最佳网投变型相同。
[0308]
在每个周期,座钟100以一定值向后驱动手表200的显示器4、5,所述值保证将显示器切换到12点0分位置,例如对于在12个小时上的小时显示的时间设置,所述值为13小时。在通过12点0分的基准位置期间,每个显示器4、5被棘爪阻挡。更具体地,该基准位置是可调节的,并且,特定于至少一个显示器4、5(更具体地每个显示器4、5)的棘爪的阻挡位置也是可调节的。
[0309]
座钟100将手表的显示器4、5驱动到正确的时间,精确到
±
20秒的数量级。
[0310]
应请求以及周期性地自动执行此时间设置可根据用户在控制装置300上的请求完成和/或可以自动地(也就是说,由座钟100控制,特别是由连接到座钟100的显示器104、105的旋转的机构控制)完成。由座钟100执行的控制可以是周期性的,或者连接到由用户设定的辅助机构、警报器机构或警报器类型机构;由座钟100执行的这种控制仅在手表200存在于容座150中处于传输位置时执行。
[0311]
通过表冠类型的或类似的接口,座钟100驱动手表的分钟显示器5,并且通过所述分钟显示器在逆时针方向(缩写形式为siam)上驱动手表的小时显示器4,相当于十三个小时,从而保证在小时上通过基准位置,特别是十二点零分。当从十二点零分的位置经过时,或者有利地,当从被称为准备位置的邻近位置经过时,例如从12点15分的位置经过时,棘爪被解锁并且将分钟显示器阻挡在基准位置(特别是12:00)。在逆时针方向上的十三个小时的行程中,小时座钟的驱动继续在摩擦系统上进行。此原理与允许通过组合两个凸轮而在精确的分钟处精确调整报警器的击打时间(striking time)的原理相反,其中一个凸轮是小时凸轮,并且包括对应于预定执行击打的时间之前大约一刻钟的时间流逝的开口,该开口被布置成与销配合,以用于通过仅分钟凸轮的运动来继续驱动,该分钟凸轮在预先设定的精确分钟处触发报警器,这可以在montres breguet名下的文献ep2073076b1中读到。
[0312]
随后,通过适当的接口,座钟100在正常的顺时针方向(缩写形式为sam)上驱动手表5的分钟显示器,并通过所述分钟显示器驱动手表的小时显示器4,直到它们到达正确的时间。应该注意的是,时间设置精度高度依赖于时间设置齿轮系中的间隙和误差(out of truth),估计大约为每分钟+/-15秒到20秒。
[0313]
更具体地,基准位置和/或准备位置以及至少一个棘爪(特别是每个棘爪)的阻挡位置是可调节的。
[0314]
简而言之,这种交感手表200的相对时间设置方法包括下述布骤。
[0315]
3a:为手表200的显示器3、4、5定义基准位置。
[0316]
3b:通过用户在座钟100或手表200中包括的控制装置300上的动作应请求来执行时间设置,或者由座钟100控制来周期性地自动执行时间设置。
[0317]
3c:为了执行相对时间设置,座钟100在逆时针方向上向后驱动手表的显示器4、5,行程足够长以保证显示器4、5通过基准位置。
[0318]
3d:对于显示12小时显示的手表200,选择大于12小时的行程值,特别是但不限于用于每天两次的时间设置。
[0319]
3e:更具体地,手表200特别地但非限制性地对于其显示器4、5中的每一个配备有棘爪,该棘爪被布置成在至少一个显示器4、5切换到对应于基准位置的位置时阻挡该至少一个显示器4、5。
[0320]
3f:更具体地,控制装置300配备有调节装置,以调节专用于至少一个显示器的棘
爪的阻挡位置,或者调节专用于每个显示器的棘爪的阻挡位置。
[0321]
更具体地,控制装置300配备有用于调节基准位置的调节装置。
[0322]
3g:更具体地,选择由座钟100控制的周期性类型的自动时间设置,其通过连接到座钟100的显示器的旋转的机构周期性地控制,或者通过在由用户在报警器机构或报警器类型机构中定义的时刻触发由用户设置的辅助机构来控制。
[0323]
3h:更具体地,通过用户在时间设置请求期间的动作或者通过时间设置控制器100来触发周期性时间设置。
[0324]
3i:更具体地,在逆时针方向上,座钟100通过接口驱动手表的分钟显示器5,并且通过所述分钟显示器驱动手表的小时显示器4,以便在基准位置阻挡分钟显示器,座钟100进行的小时驱动在摩擦系统上继续。
[0325]
3j:更具体地,然后,通过合适的接口,座钟100此时在正常的顺时针方向上驱动手表的分钟显示器5,并且通过所述分钟显示器驱动手表的小时显示器4,直到它们到达正确的时间。
[0326]
3k:更具体地,定义接近基准位置的准备位置,在经过该准备位置时棘爪被解锁,控制装置300配备有用于调节准备位置的调节装置。
[0327]
3l:更具体地,交感组件1000配备有第一传输线和第二传输线,第一传输线包括座钟的第一致动器501,第一致动器501被布置成与手表的第一致动器901协作,第一致动器901用于在不停止谐振器10的情况下控制手表200的显示器相对于谐振器10的联结或脱离联结,第二传输线包括座钟的第二致动器502,第二致动器502被布置成与手表的第二致动器902协作,第二致动器902提供定位运动。
[0328]
3m:更具体地,手表200配备有停止机构20,以在时间设置期间保持谐振器10的惯性质量体15停止。
[0329]
3n:更具体地,手表200配备有联结机构,用于在时间设置期间在谐振器10的惯性质量体15没有被停止的情况下启动显示器4。
[0330]
在称为通过相对时间设置进行上条的第四种变型中,上条发生在如上所述的手表的相对时间设置的逆时针旋转的十三小时期间。类似地,应要求以及自动地,每天执行两次。通过手表的显示器4、5逆时针旋转十三个小时,确保手表的上条持续十三个小时。
[0331]
第四种变型允许用单个旋转接口进行时间设置和上条。
[0332]
时间设置功能通过用户作用于座钟(应要求)触发,或由连接到座钟显示器的(周期性)旋转的机构触发。
[0333]
通过表冠类型接口或类似接口,座钟100在逆时针方向上将手表的分钟显示器5和手表的小时显示器4驱动等同于相对时间设置的十三个小时的时间。这种旋转可以用来卷绕发条盒,有利地卷绕13小时。
[0334]
提出了两种方案:
[0335]-除了沿逆时针方向旋转显示器之外,接口还驱动手动上条齿轮系;
[0336]-或者,最终齿轮系包括棘爪运动件,其允许在显示器反向旋转期间发条盒被上紧。
[0337]
第一个可选方案容易实现。它包括棘爪系统,因此可以进行相对时间设置显示器的顺时针旋转,但棘爪系统不在最终齿轮系中。
[0338]
第二个可选方案令人关注,因为它只需要在最终齿轮系中的棘爪轮(pawl wheel)。时间设置摩擦必须允许从卷绕传递转矩;典型的分轮转矩约为1n.mm,用于最大上条的典型分轮转矩为3n.mm。联结系统可以取代传统的时间设置摩擦。
[0339]
本发明允许在应要求的时间设置期间保证持续13小时的上条,以及在周期性时间设置时保证持续13小时的上条。
[0340]
简而言之,通过相对时间设置对这种交感手表200进行上条的方法包括下述步骤。
[0341]
4a:定义手表200的显示器的基准位置。
[0342]
4b:通过根据用户在包括于座钟100或手表200中的控制装置300上的动作应请求进行的时间设置来执行上条,或者通过由座钟100自动地周期性控制的时间设置来执行上条,并且,为了执行允许上条的相对时间设置,座钟100在逆时针方向上以足够长的行程向后驱动手表的显示器4、5,以确保显示器4、5通过基准位置。
[0343]
4c:更具体地,对于呈现12小时显示的手表200,特别地但非限制性地对于每天两次的时间设置,行程被选择为具有大于12小时的值。
[0344]
4d:更具体地,手表200为其显示器4、5中的每一个配备有棘爪,该棘爪设置成在该显示器4、5切换到对应于基准位置的位置时阻挡该显示器4、5。
[0345]
4e:更具体地,控制装置300配备有调节装置,以调节专用于至少一个显示器的棘爪的阻挡位置,或者调节专用于每个显示器的棘爪的阻挡位置。
[0346]
4f:更具体地,控制装置300配备有用于调节基准位置的调节装置。
[0347]
4g:更具体地,选择由座钟100控制的周期性自动时间设置,其通过连接到座钟100的显示器的旋转的机构周期性地控制,或者通过在由用户在报警器或报警器类型机构中定义的时刻触发由用户设定的辅助机构来控制。
[0348]
4h:更具体地,通过用户在时间设置请求期间的动作或者通过座钟100的时间设置控制来触发周期性时间设置。
[0349]
4i:更具体地,在逆时针方向上,座钟100通过接口驱动手表的分钟显示器5,并且通过所述分钟显示器驱动手表的小时显示器4,以在基准位置阻挡分钟显示器,座钟100进行的小时驱动继续在摩擦系统上进行,以确保所定义的上条。特别地,定义接近基准位置的准备位置,在经过该准备位置时棘爪被解锁,以便阻挡分钟显示器。
[0350]
4j:更具体地,在显示器逆时针旋转期间,接口会卷绕发条盒。棘爪位于最终齿轮系的外部,并且除了显示器之外,接口还驱动包括在手表200中的手动上条齿轮系,或者最终齿轮系包括棘爪运动件,其允许在显示器反向旋转期间通过显示齿轮系以及位于棘爪运动件和发条盒之间的部分最终齿轮系对发条盒进行上条。
[0351]
在被称为永久时间设置变型的第五种变型中,时间设置像上条一样只在请求时发生。
[0352]
在此变型中,手表200必须配备有停止机构20,该停止机构20被设计成停止谐振器10的操作,特别是通过臂或板簧或另一个致动器支撑在惯性质量体15上或谐振器的合适元件上来停止谐振器10的操作。更具体地,该停止机构20是包括停止杆的停秒机构25。
[0353]
停止杆被激活。
[0354]
座钟将显示器向后驱动十三个小时,它们在经过基准位置(特别是12点00分)时被棘爪阻挡。
[0355]
这十三个小时的反向旋转也保证了手表像以前一样上条。
[0356]
然后,座钟驱动显示器至该小时处,精度约为
±
20秒。
[0357]
随后,座钟继续驱动显示器,直到手表在座钟上被解锁。
[0358]
在座钟上解锁手表会释放停止杆。
[0359]
此第五种变型避免了手表的持续操作(显示除外)、每日上条和时间设置,从请求使用手表开始,这些功能仅执行一次。
[0360]
时间设置功能仅通过用户对座钟的动作(根据请求)触发。
[0361]
通过第二接口(按钮类型),座钟停止手表并使显示器脱离联结(分轮联结器)。
[0362]
通过第一接口(表冠类型),座钟驱动分钟显示器,并且通过所述分钟显示器沿逆时针方向驱动小时显示器十三小时的等同时间,从而以类似于第四变型的方式,保证将小时切换到基准位置,特别是12时00分,并且保证大于十二小时动力储备的最小上条,特别是具有十三小时动力储备的值。在反向操作中在将近到达基准位置(特别是12时00分)时,例如当从12时15分位置或类似位置经过时,棘爪被解锁,并将分钟显示器阻挡在基准位置(特别是12时00分);座钟的逆时针十三小时驱动在摩擦系统上继续。
[0363]
随后,通过第一接口,座钟驱动分钟显示器,并通过所述分钟显示器驱动小时显示器,直到它们到达准确的时间。应该注意的是,时间设置精度高度依赖于时间设置齿轮系中的间隙和误差(out of truth),估计为每分钟+/-20秒。
[0364]
随后,只要手表没有从座钟上解锁以便佩戴,座钟就经由第一接口以真实速度驱动显示器。
[0365]
当手表被解锁以便由用户佩戴时,座钟通过第二接口释放停止杆和显示器离合联结器,手表再次独立。
[0366]
本发明的优点是,避免了当手表在座钟上时手表的运行磨损。
[0367]
它还保证了无论手表何时被拿走,都具有至少13小时的电池寿命。
[0368]
简而言之,通过永久时间设置来对这种交感手表200上条的方法包括下述步骤。
[0369]
5a:定义手表200的显示器的基准位置。
[0370]
5b:仅根据用户在包括于座钟100或手表200中的控制装置300上的动作应请求来执行时间设置,或者由座钟100自动周期性地控制执行时间设置,并且为了设置时间,座钟100以足够长的行程在逆时针方向上向后驱动手表的显示器4、5,以确保显示器4、5通过基准位置;或者座钟100控制手表200的被设置成确保显示器借助于心形件移位到基准位置的装置。
[0371]
5c:在逆时针方向上,座钟100通过接口驱动手表的分钟显示器5,并通过所述分钟显示器驱动手表的小时显示器4,以便在基准位置阻挡分钟显示器,座钟100针对小时的驱动在摩擦系统上继续进行,然后,通过合适的接口,座钟100此时在正常的顺时针方向上驱动手表的分钟显示器5,并通过所述分钟显示驱动手表的小时显示器4,直到它们在连续旋转中到达精确时间。更具体地,接近基准位置的准备位置(在通过该准备位置时棘爪被解锁)用于分钟显示器的这种阻挡。
[0372]
5d:在显示器4、5被驱动到基准位置之前,用户在控制装置300上的动作致动停止机构20以停止谐振器10的操作,并且在手表200的显示器4、5已经到达瞬时时间之后,只要手表200在容座150中处于传输位置,座钟100就驱动显示器4、5,并且,通过从容座150中取
出手表200,使手表200与座钟100分离,并且产生停止机构20的释放以允许谐振器10操作。
[0373]
5e:因此,显示器4、5在逆时针方向上被驱动到基准位置。
[0374]
5f:当用户作用在控制装置300上时,座钟100通过全有或全无接口致动停止机构20,以停止谐振器10的操作。
[0375]
5g:更具体地,为了向后驱动显示器4、5,座钟100通过运动传输接口驱动显示器4、5,并且在显示器4、5到达瞬时时间之后,只要手表200在容座150中处于传输位置,座钟100就在正常的顺时针方向上以真实速度驱动显示器4、5,并且,通过从容座150取出手表200,使手表200与座钟100分离,并且在运动传输接口与显示器4、5之间脱离联结。
[0376]
5h:更具体地,对于呈现12小时显示的手表200,选择具有大于12小时的值的行程,特别地但非限制性地用于每天两次的时间设置。
[0377]
5i:更具体地,手表200为其显示器4、5中的每一个配备棘爪,该棘爪被布置成在显示器4、5切换到对应于基准位置的位置时阻挡该显示器4、5。
[0378]
5j:更具体地,控制装置300配备有调节装置,以调节专用于至少一个显示器的棘爪的阻挡位置,或者调节专用于每个显示器的棘爪的阻挡位置。
[0379]
5k:更具体地,控制装置300配备有用于调节基准位置的调节装置。
[0380]
5l:更具体地,选择由座钟100控制的永久自动时间设置触发,其通过连接到座钟100的显示器的旋转的机构周期性地控制,或者通过在由用户在报警器类型机构中定义的时刻触发由用户设定的辅助机构来控制。
[0381]
5m:更具体地,这种永久时间设置由用户在时间设置请求期间的动作来触发,或者由座钟100的时间设置控制来触发。
[0382]
5n:更具体地,控制装置300配备有用于调节准备位置的调节装置。
[0383]
5o:更具体地,在允许上条的永久时间设置期间,仅在用户对控制装置300施加动作期间应请求执行上条。
[0384]
被称为获取用于根据请求设置时间的数据的第六种变型的目的是在上述第一、第三和第五种变型中描述的交感座钟的操作模式的框架内,允许读取座钟显示的时间并将信息传输给手表。图8至12示出在用于按需时间设置的座钟上的这种数据获取。
[0385]
此第六变型使用了如下这样的机构:该机构允许读取当前时间和基准时间之间的差异,对于所有描述的变型,该基准时间是任意选择的并且非限制性地为12时00分,并且该机构还允许将该差异的值的信息传输给手表,以便在将手表的显示器返回到基准位置(特别是12时00分)之后对手表进行分度定位(index)。有利的是,这种传输可以给出精确的偏差(deviation),或者偏差与根据秒信号进行时间设置所需的偏移(offset)的总和。
[0386]
这里以类似于称为逐步时间设置的第一变型的方式解释第六变型,可以看出它也适用于第三和第五变型。
[0387]
回想一下,根据第一变型,时间设置功能通过用户对座钟的动作(根据在控制装置300处的请求)或通过连接到座钟显示器的(周期性)旋转的机构来触发。通过第一接口,座钟停止谐振器10,特别是手表的摆轮15(停止摆轮杆机构),并致动锤件机构,该锤件机构使手表的小时显示器从4点返回到12点,并通过所述小时显示器使手表的分钟显示器5返回到00分。然后,经由第二接口(按钮),座钟以两分钟的步级驱动手表的分钟显示器5,并通过所述分钟显示器驱动手表的小时显示器4,直到这些显示器4和5达到并指示精确时间加上非
限制性的两分钟步级。这个功能可以保证锤件的再赋能。在此阶段期间,由于星形轮,特别是30齿或15齿的星形轮,分钟轮被精确定位。然后,座钟等待接下来通过下面的两分钟,以释放停止杆并允许手表准时运行。
[0388]
此第六变型的第一实施例包括在座钟100处的单个凸轮601,并且执行逐步时间设置。
[0389]
座钟100包括12小时旋转一圈的蜗形凸轮601,该蜗形凸轮601在其周边上包括360个支靠部6010,每两分钟一个支靠部。此凸轮与座钟的显示器是一体的(十二小时转一圈)。
[0390]
座钟100包括触杆602,特别是摇杆,它在第一端包括齿条603,在相对的第二端包括带有喙部605的触杆指件604。所述触杆指件默认被保持在对应于基准时间加上一定偏移的休止位置,该偏移对应于可能的齿轮系间隙和允许根据第一变型利用停秒实现的时间设置功能的可能的额外跳变。有利的是,通过一个调节偏心轮(未示出)来保持该触杆602,使得制表师能够容易地补偿这些间隙。
[0391]
根据montres breguet名下的申请ep20158326.7的教导,也可以有利地利用微调齿条进行调节。
[0392]
当用户请求时间设置时,或者当座钟本身请求这种时间设置时,建议的时间设置循环包括使手表到达基准位置(例如12时00分)的阶段。
[0393]
承载触杆指件604的触杆602受到复位装置的作用,其特别是弹性复位装置,例如弹簧。
[0394]
一旦执行了这种向基准位置的到达,则座钟100释放触杆602,触杆602被图中未示出的所述复位装置旋转。触杆602进行旋转,直到它抵靠在凸轮601的360个支靠部6010之一上。这种旋转正好对应于将基准时间与座钟上显示的时间分开的两分钟步级的数量。
[0395]
以非限制性的方式,这种旋转通过接口(特别是往复类型接口)传递给手表及其显示器或其分钟显示器。或者,接口也可以是可旋转的,而不是往复的。
[0396]
在该功能结束时,座钟100通过类似于已知的大自鸣报时机构的机构对触杆602再赋能并将触杆602返回到其休止位置,并准备好用于新的功能。
[0397]
此第六变型的第二实施例包括在座钟100中的两个凸轮610和620,并且执行逐步时间设置。
[0398]
在第一实施例中使用的360个位置凸轮实际上是一个难以制造的元件,并且即使在座钟的情况下也必然体积庞大。
[0399]
此第二实施例的操作类似于第一单凸轮模式的操作,但是补偿了制造凸轮的困难:因此座钟100包括两个凸轮:第一小时凸轮610在12小时旋转一圈并在其周边上包括12个支靠部6100,每小时一个支靠部;第二分钟凸轮620一小时旋转一圈并包括30个支靠部6200,每两分钟一个支靠部。这些凸轮与座钟显示器是一体的,即,分别与小时显示器104(十二小时一转)和分钟显示器105(一小时一转)是一体的。
[0400]
座钟100还包括两个触杆:第一触杆630,其被布置成与第一小时凸轮610配合,以及第二触杆640,其被布置成与第二分钟凸轮620配合。这两个触杆默认被保持在休止位置,对于第一小时触杆630,该休止位置对应于基准时间加上对应于可能的齿轮系间隙的偏移,对于第二分钟触杆640,该休止位置对应于基准时间加上允许根据第一变型利用停秒机构25的时间设置功能的可能的额外跳变。
[0401]
一旦手表200被设置到基准时间,座钟100就释放触杆630和640,直到其停靠在它们各自的凸轮610、620上。这种旋转被传递到接口和手表200,特别是经由差动齿轮系680,其中一者相对于另一者具有1/12的比率,以便累积两个凸轮的值。该差动机构680的输出装置被布置成驱动第二致动器502,特别地但非限制性地,经由第二控制凸轮684。
[0402]
更具体地,该第二致动器502包括曲柄和连杆,该曲柄和连杆被布置成推动和拉动包括在该第二致动器502中的第二控制杆512,从而赋予第二控制杆512往复运动,以用于对手表200进行时间设置。可选地,第二控制杆512被第二弹性复位装置513朝第二凸轮684复位。
[0403]
在最佳网投变型中,座钟100包括至少一个机电或电子机芯,其被设置成控制输出运动件的运动,该输出运动件被设置成驱动这种第二致动器502,特别地但非限制性地,借助于第二控制凸轮684。
[0404]
这种旋转通过所述接口被传递到手表200及其分钟显示器5。
[0405]
在该功能结束时,座钟100通过类似于已知的大自鸣报时机构的机构对两个触杆630和640再赋能并将它们返回到其休止位置,并准备好用于新的功能。
[0406]
简而言之,用于获取座钟100上的数据以根据请求设置手表200的时间的方法包括下述不同步骤。
[0407]
6a:定义手表200的显示器的基准位置。
[0408]
6b:当手表200被放置在容座150上时,或者当切换到座钟100上的预定时刻时,或者通过用户对包括在座钟100或手表200中的控制装置300的动作而发出请求时,或者根据包括在座钟100中的钟表机芯900的控制,座钟100执行手表200的时间设置,并且,通过在座钟100处实现读取机构来读取由座钟100显示的时间,以便将时间信息传输给手表200,该读取机构读取当前时间相比于基准时间之间的偏差,并且被设置为将该偏差的值的信息传输到手表200,以便在将手表的显示器4、5放置在基准位置之后对手表进行分度定位。
[0409]
6c:更具体地,读取机构被设置成传输所述值的信息或者精确偏差的信息或者校正偏差的信息,该校正偏差是所述偏差和根据秒信号进行时间设置所需的偏移的总和。
[0410]
6d:更具体地,确定预定的时间设置步级值,并且座钟100将一个传输线定位在对应于时间设置的位置,并且在相继的步级中以每个预定步级值致动一个传输线,其能够向手表200内部的时间设置机构赋予精确实现当前时间的显示所需的任何运动。并且,为了通过传输线的相继步级致动手表200内部的时间设置机构,执行一个时间设置序列,根据该时间设置序列,座钟100的停止控制机构120控制手表200的停止机构20,以在设置时间之前停止谐振器10或将最终齿轮系与显示齿轮系脱离联结,并且控制包括在手表200中的重置机构500,以将手表200的显示器3、4、5即刻返回到它们的基准位置。
[0411]
6e:然后,以相继的步级控制显示器3、4、5前进到重启显示位置,该重启显示位置对应于在座钟100上可读的精确瞬时时间,加上由该机构施加的一个预定步级或整数个预定步级的对应值。
[0412]
6f:然后,当座钟100切换到对应于重启显示位置的时间时,会改变停止控制机构120的状态,并且控制启动/停止控制传输线的运动,以识别时间设置结束的动作,并且控制脉冲或转矩到手表200的停止机构20的传递,以便释放停止机构20并且重启谐振器10或者将最终齿轮系与显示齿轮系联结。
[0413]
6g:更具体地,为了执行复位,手表200识别在时间设置位置在座钟100和手表200之间的传输线的运动,并且利用这样的手表200:该手表的第一致动器901致动用于停止谐振器10和手表200的停止机构20,手表的此第一致动器901构成用于控制至少一个锤件的机构,以便特别是针对每个被调整的钟表变量,通过锤件402、701与和其中一个显示器一体旋转(更具体地但非限制性地,由分轮承载)的心形件401、702、703的配合,使得至少一个小时显示器4和至少一个分钟显示器5定位在基准位置。
[0414]
6h:更具体地,为了执行时间设置序列,座钟100驱动另一条传输线,以将特定的显示施加到手表200,该另一条传输线包括手表200所配备的手表的第二致动器902,该第二致动器902以往复运动方式操作,借助于手表的第二致动器902,座钟100驱动手表200的分钟显示器5经过整数个预定步级,并且通过手表的分钟显示器5驱动手表200的小时显示器4,直到手表200上的显示对应于重启显示位置。
[0415]
6i:更具体地,为了执行时间设置序列,座钟100配备有用于通过机芯900驱动小时和分钟蜗形轮的机构,以及用于根据请求感测瞬时小时和分钟的机构。
[0416]
6j:更具体地,为了执行时间设置序列,座钟100配备有用于通过机芯900驱动单个分钟蜗形轮的机构,以及用于感测瞬时分钟的机构,所述单个分钟蜗形轮以十二小时一转或二十四小时一转的速度被驱动,包括对应于所选择的分钟步级乘以12或24的一定数量步级。
[0417]
6k:更具体地,选择两分钟的预定步级,并且要执行的步级数量在0到359个步级之间可变,在此期间,由于30齿或15齿的星形轮,手表200的分轮或分钟轮被精确定位,该星形轮可以由分轮本身形成。
[0418]
6l:更具体地,手表200的分轮或分钟轮通过与分轮或分钟轮成一体的星形轮和具有一个或多个齿的跳簧的组合来精确定位,星形轮的齿数和跳簧的齿数共同限定了预定步级的值。
[0419]
6m:更具体地,当座钟100驱动手表的分钟显示器5时,它还确保至少一个锤件402、701或每个锤件402、701的至少部分再赋能。
[0420]
6n:更具体地,为了执行对瞬时小时和分钟的感测,使用这样的座钟100:该座钟100包括十二小时旋转一周的单个蜗形凸轮601,其周边上包括三百六十个支靠部6010,也就是说每两分钟一个支靠部,单个蜗形凸轮601与十二小时旋转一周的座钟100的显示器成一体,并且座钟100包括受到弹性复位装置作用的触杆602,该触杆602在第一端包括齿条603,在相对的第二端包括带有喙部605的触杆指件604,该触杆602默认被保持在休止位置,该休止位置对应于基准时间加上正或零偏移,所述正或零偏移对应于可能的齿轮系间隙以及对应于允许利用停秒执行时间设置功能的可能的额外跳变,并且,当用户请求时间设置时,或者当座钟100请求时间设置时,时间设置循环以使手表100到达基准位置的阶段开始,并且一旦执行了这种向基准位置的到达,座钟100就释放触杆602,触杆602进行旋转,直到它抵靠凸轮601的支靠部6010之一,这种旋转正好对应于将基准时间与座钟100上显示的时间分开的步级数量。
[0421]
6o:更具体地,在该功能结束时,座钟100对触杆602再赋能并将触杆602返回到其休止位置,并准备好用于新的功能。
[0422]
6p:更具体地,为了执行瞬时小时和分钟的感测,使用这样的座钟100:该座钟100
包括第一小时蜗形凸轮610和第二分钟蜗形凸轮620,第一小时蜗形凸轮610十二小时旋转一周并在其周边上包括十二个支靠部6100,每小时一个支靠部,第二分钟蜗形凸轮620一小时旋转一周并包括三十个支靠部6200,每两分钟一个支靠部,该凸轮610和620分别固定到十二小时旋转一圈的座钟的小时显示器104和一小时旋转一圈的座钟的分钟显示器105,座钟100包括设置成与第一小时凸轮610配合的第一触杆630和设置成与第二分钟凸轮620配合的第二触杆640,第一触杆630和第二触杆640默认被保持在休止位置,对于第一小时触杆630,该休止位置对应于基准时间加上对应于可能的齿轮系间隙的正或零偏移,对于第二分钟触杆640,该休止位置对应于基准时间加上允许利用停秒机构25的时间设置功能的可能的额外跳变,并且,当用户请求设置时间时,或者当座钟100请求时间设置时,时间设置循环以使手表200到达基准位置的阶段开始,并且一旦执行了这种向基准位置的到达,座钟100就释放第一触杆630和第二触杆640,直到它们通过旋转支靠在各自的凸轮610、620上,所述旋转经由差动齿轮系680被传递到接口和手表200的分钟显示器5,其中一者相对于另一者具有1/12的比率,以便累积两个凸轮610、620的值。
[0423]
6q:更具体地,在该功能结束时,座钟100对第一触杆630和第二触杆640再赋能并将它们返回到其休止位置,并准备好用于新的功能。
[0424]
称为显示器的基准时间设置的第七变型由图13至18示出,其提出了将手表200的显示器返回到基准位置(特别是12时00分)的功能的解决方案,这是实现上述第一、第三和第五变型所必需的功能。
[0425]
这是关于针对手表200和座钟100之间的接口(例如校正器)的第一位移允许执行一个循环,该循环随时在手表200中执行以下功能:
[0426]-将显示齿轮系与最终齿轮系脱离联结;
[0427]-将显示器返回到基准位置,例如12时00分;
[0428]-尽可能精确地保持这个位置;
[0429]-允许时间设置功能(稍后将详细说明);
[0430]-利用时间设置功能对锤件再赋能;
[0431]-或者对所述锤件解除激活。
[0432]
在手表200和座钟100之间的接口发生第二位移时:
[0433]-将显示齿轮系联结在最终齿轮系上;
[0434]-如有必要,对锤件再赋能。
[0435]
为此,手表200包括:
[0436]-类似于计时码表锤件的锤件701,其具有赋能位置和作用位置,在赋能位置,锤件由棘爪保持并被弹簧张紧,在作用位置,锤件搁置在第一心形小时凸轮702的周边上,以迫使凸轮702旋转到其最小半径;
[0437]-此第一心形小时凸轮702与计时机构中使用的类似。第一小时凸轮702由小时轮708承载;
[0438]-由分钟显示器705承载的第二截顶心形分钟凸轮703;
[0439]-跳簧704,其与30齿星形轮抵靠配合,该星形轮与分钟显示器成一体(图中未示出);
[0440]-由分钟显示器承载的30齿星形轮(图中未显示);
[0441]-分轮的小齿轮705,其可以充当星形轮,特别是与双跳簧7040配合的15齿星形轮,如图17所示;
[0442]-在显示齿轮系705-707-708和最终齿轮系710之间的联结机构706,包括在附图所示的特定情况下的摩擦弹簧709;
[0443]-用于控制功能的三个阶段的机构(图中未显示)。
[0444]
所述循环分三个阶段进行:
[0445]-在图15的位置,触发向基准位置(特别是12时00分)的设置,并且通过接口解除联结;
[0446]-保持显示器的位置以用于时间设置,对锤件隔离或再赋能;
[0447]-经由接口将锤件联结,并且在必要时对锤件再赋能。
[0448]
在第一阶段,接口将离合联结器706致动到其脱离联结位置,如图16所示。
[0449]
然后,接口释放锤件701,锤件701通过第一心形凸轮702将小时显示器并通过走时部件将分钟显示器带到基准位置,特别是12时00分。
[0450]
如图13和14所示,相对于
±
1.5分钟的小时显示器位置误差,典型的走时部件设置允许分钟显示器的位置误差为大约3分钟,这取决于锤件向心形件传递的重置方向。
[0451]
有利的是,附加的分钟心形凸轮703在锤件701的功能结束时工作,并保证精确的分钟位置。
[0452]
在第二阶段期间,跳簧704和30齿星形轮以两分钟校正步级将显示器的位置保持在基准位置(特别是12时00分),以及所有随后的位置。在这个例子中,通过与如图17所示的双跳簧协作,15齿分轮有利地代替了30齿星形轮。
[0453]
该机构能够在不丧失显示的情况下对锤件再赋能,时间能够以两分钟步级进行设置。
[0454]
在第三阶段,接口可以释放离合联结器,并将最终齿轮系与显示齿轮系重新连接。
[0455]
因此,两个心形件凸轮的选择提高了操作精度。
[0456]
图18示出了宝玑计时码表的联结机构1050,其包括夹持件721,它的功能是在柱轮740的控制下确保联结和脱离联结,所述柱轮740控制夹持臂721和722的角度偏移以打开或关闭夹持件,从而实现脱离联结或联结。
[0457]
此第七变型可以涉及时间设置机构,并且允许显示齿轮系从最终齿轮系脱离联结,以及允许它们彼此再次联结。
[0458]
在有利地使用分轮齿部用于星形轮功能的情况下,结构被简化。
[0459]
简而言之,用于设置显示器的基准时间的方法包括下面描述的不同步骤。
[0460]
7a:定义显示器的基准位置。
[0461]
7b:应用这样的手表200:该手表200包括位于显示齿轮系705、707、708和最终齿轮系710之间的联结机构706,并且包括可在赋能位置和作用位置之间移动的锤件701,在赋能位置,锤件701由棘爪保持并被弹簧张紧,在作用位置,锤件701被布置成搁置在第一小时心形凸轮702的周边上,以便约束第一小时心形凸轮702旋转到其最小半径,其中第一小时心形凸轮702由包括在手表200中的小时轮708承载。
[0462]
并且,执行包括三个阶段的循环:
[0463]
7c:第一阶段,在此期间,通过座钟100和手表200之间的接口的第一位移,联结机
构706被该接口断开联结,该接口将联结机构706致动到其脱离联结位置,并且,在使离合联结器706脱离联结之后,该接口释放锤件701,锤件701通过第一小时心形凸轮702使小时显示器4并且通过走时部件使分钟显示器5返回到基准位置。
[0464]
7d:第二阶段,在此期间,保持显示器4、5的位置以用于时间设置,对锤件701隔离或再赋能。
[0465]
7e:第三阶段,在此期间,通过座钟100和手表200之间的接口的第二位移,使最终齿轮系和显示齿轮系重新连接,联结机构706被接口联结,该接口朝向其联结位置致动联结机构706,并且在此第三阶段期间,可以通过接口对锤件701再赋能。
[0466]
7f:更具体地,在锤件701的行程结束时,锤件701与和分钟显示器5成一体的截顶心形形状的第二分钟心形凸轮703配合,以保证精确的分钟位置。
[0467]
7g:更具体地,确定预定的时间设置步级值,并且在第二阶段期间,通过包括在手表200中的跳簧704和星形轮之间的协作,将显示器的位置保持在基准位置,然后逐步地保持在每个随后的位置,以允许在不丧失显示的情况下对锤件701的再赋能。
[0468]
7h:更具体地,将由分钟显示器5承载的星形轮选择为:与简单的单齿跳簧704配合的30齿星形轮,或者,同时与包括两个齿的双跳簧7040的单个齿配合的15齿分钟分轮的小齿轮。
[0469]
7i:更具体地,手表200的分轮或分钟轮通过与分轮或分钟轮成一体的星形轮和具有一个或多个齿的跳簧的组合来精确定位,星形轮的齿数和跳簧的齿数一起限定了预定步级的值。
[0470]
7j:更具体地,联结机构706配备有摩擦弹簧709。
[0471]
7k:更具体地,应用计时码表联结机构作为联结机构706,其包括夹持件721,它的功能是在柱轮740的控制下确保联结和脱离联结,所述柱轮740控制夹持臂721、722的角度偏移以打开或关闭夹持件,其分别对应于脱离联结或联结。
[0472]
7l:更具体地,使用三阶段控制机构。特别地,该控制机构包括至少一个柱轮740。
[0473]
第八变型作为该第七变型的替代,称为基准时间设置,如图19至21所示,其提出了将手表200的显示器返回到基准位置(特别是12时00分)的功能的另最佳网投解决方案,该功能是实现上述第一、第三和第五变型所必需的。
[0474]
这里同样的,它是关于针对手表200和座钟100之间的接口(例如校正器)的第一位移允许执行一个循环,该循环随时在手表200中执行以下功能:
[0475]-将显示齿轮系与最终齿轮系脱离联结;
[0476]-将显示器返回到基准位置,例如12时00分;
[0477]-尽可能精确地保持这个位置;
[0478]-允许时间设置功能(稍后将详细说明)。
[0479]
并且,在手表和座钟之间的接口发生第二位移时,将显示齿轮系联结在最终齿轮系上。
[0480]
应用这样的手表200,其包括:
[0481]-与小时轮808啮合的齿条823,小时轮808与手表的小时显示器4成一体,并承载包括棘齿缺口的小时凸轮802;
[0482]-棘爪801,其被棘爪簧8010保持与小时凸轮802接触;
[0483]
其中,齿条823被布置成在顺时针方向上拨动小时轮808,并且由复位弹簧825驱动。
[0484]
手表200还包括齿条小齿轮824或小时小齿轮,在手表200不与座钟100配合时的手表200的正常操作期间,该齿条小齿轮824设置成对齿条823驱动和赋能,齿条823在每个齿处被拨动。
[0485]
手表200还包括在显示齿轮系805;807;808和最终齿轮系810之间的联结机构806。
[0486]
并且,在任何时候,手表200的基准时间设置都通过包括三个阶段的循环来执行,其包括:
[0487]-第一阶段,在此第一阶段期间,通过座钟100和手表200之间的接口的第一位移,触发到基准位置的设置,执行手表200的显示器4、5的基准时间设置,并且联结机构806被该接口脱离联结,该接口朝向联结机构806的脱离联结位置致动联结机构806,这允许齿条823沿逆时针方向驱动手表200的小时显示和分钟显示齿轮系旋转所需的圈数,直到棘爪801遇到小时凸轮的棘齿开口,这种阻挡对应于基准显示位置;
[0488]-第二阶段,在此第二阶段期间,保持显示器4、5的位置以用于时间设置,并且,由座钟100控制的时间设置机构通过对齿条801再赋能沿顺时针方向将手表200的显示器4、5的时间设置为精确时间;以及
[0489]-第三阶段,在此第三阶段期间,通过座钟100和手表200之间的接口的第二位移,使最终齿轮系和显示齿轮系重新连接,联结机构806通过接口被联结,该接口朝向联结机构806的联结位置致动联结机构806,并且在此第三阶段期间,可以通过接口对齿条801再赋能或完成在第二阶段期间开始的齿条801的再赋能。
[0490]
更具体地,应用这样的手表200:其包括承载具有开口8020的小时凸轮802的手表的小时显示器4,由手表的分钟显示器805承载的第二分钟凸轮803,该第二分钟凸轮803包括棘齿开口8030或缺口831。并且,联结机构806在它的脱离联结位置被脱离联结,这允许齿条823在逆时针方向上驱动手表200的小时显示和分钟显示齿轮系旋转所需的圈数,直到棘爪801遇到第一小时凸轮802的开口8020,这对应于在基准时间之前的分钟数,在棘爪801能够搁置在第二分钟凸轮803上以实现对应于到达基准时间之前的最后几分钟的旋转并且直到棘爪801被阻挡在第二分钟凸轮803的棘齿开口8030中的时刻,这种阻挡对应于基准显示位置。
[0491]
类似于第七变型,手表200还包括跳簧804,跳簧804被布置成与星形轮,特别是与分钟显示运动件805成一体的30齿星形轮,协作,并且包括用于控制该功能的三个阶段的机构。
[0492]
所述循环分三个阶段进行:
[0493]-触发向基准位置(特别是12时00分)的设置,并且通过接口解除联结;
[0494]-保持显示器的位置以用于时间设置;
[0495]-经由接口将棘爪801联结,并且在必要时对棘爪801再赋能。
[0496]
如图19和20所示,在手表正常工作期间,去除了交感作用,小时小齿轮824对齿条823驱动和赋能,齿条823在每个齿处被拨动。
[0497]
在第一阶段,接口将离合联结器806致动到其脱离联结位置,如图21所示。
[0498]
该离合联结器释放小时显示齿轮系和分钟显示器,其由齿条823沿逆时针方向驱
动。
[0499]
由齿条823沿逆时针方向驱动的显示齿轮系能够使小时轮(小时显示器)旋转超过一圈,并且使分轮(分钟显示器)旋转超过十二圈,其中小时轮和分轮通过走时部件连接。
[0500]
在第二阶段期间,通过对齿条801再赋能,时间设置机构能够在顺时针方向上执行其到达精确时间的功能。如果通过时间设置没有完成再赋能,则通过手表显示器在顺时针方向上的正常旋转来补充。
[0501]
在第三阶段,接口可以释放离合联结器,并将最终齿轮系与显示齿轮系重新连接。
[0502]
简而言之,所述基准时间设置方法包括下述的不同步骤。
[0503]
8a:定义显示器的基准位置。
[0504]
8b:应用这样的手表200,其包括:
[0505]-齿条823,其与固定在手表的小时显示器4上的小时轮808啮合,小时轮808承载包括棘齿缺口的小时凸轮802;
[0506]-棘爪801,其被棘爪簧8010保持搁置在小时凸轮802上;
[0507]
其中,齿条823被布置成在顺时针方向上拨动小时轮808,并且由复位弹簧825驱动。
[0508]
手表200还包括齿条小齿轮824或小时小齿轮,在手表200不与座钟100配合时的手表200的正常操作期间,该齿条小齿轮824设置成对齿条823驱动和赋能,齿条823在每个齿处被拨动。
[0509]
手表200还包括在显示齿轮系805;807;808和最终齿轮系810之间的联结机构806。
[0510]
并且,在任何时候,手表200的基准时间设置都由包括三个阶段的循环来执行,包括:
[0511]
8c:第一阶段,在此第一阶段期间,通过座钟100和手表200之间的接口的第一位移,触发到基准位置的设置,执行手表200的显示器4、5的基准时间设置,并且联结机构806由接口脱离联结,该接口将联结机构806致动到其脱离联结位置,这允许齿条823在逆时针方向上驱动手表200的小时显示器和分钟显示器齿轮系旋转所需的圈数,直到棘爪801遇到小时凸轮的棘齿开口,这种锁定对应于基准显示位置;
[0512]
8d:第二阶段,在此第二阶段期间,保持显示器4、5的位置以用于时间设置,并且,由座钟100控制的时间设置机构通过对齿条801再赋能将手表200的显示器4、5的时间在顺时针方向上设置为精确时间;
[0513]
8e:第三阶段,在此第三阶段期间,通过座钟100和手表200之间的接口的第二位移,使最终齿轮系和显示齿轮系重新连接,联结机构806通过接口被联结,该接口朝向其联结位置致动联结机构806,并且在此第三阶段期间,可以通过接口对齿条801再赋能,或者完成在第二阶段期间开始的对齿条801的再赋能。
[0514]
8f:更具体地,确定预定的时间设置步级值,并且在第二阶段期间,通过包括在手表200中的跳簧804和星形轮之间的配合,将显示器的位置保持在基准位置,然后逐步保持在每个随后的位置,以允许在不丧失显示的情况下对齿条801再赋能。
[0515]
8g:更具体地,将由分钟显示器5承载的星形轮选择为:与简单的单齿跳簧804配合的30齿星形轮,或者,同时与包括两个齿的双跳簧8040的单个齿配合的15齿分钟分轮的小齿轮。
[0516]
8h:更具体地,手表200的分轮或分钟轮通过与分轮或分钟轮成一体的星形轮和具有一个或多个齿的跳簧的组合来精确定位,星形轮的齿数和跳簧的齿数一起限定了预定步级的值。
[0517]
8i:特别地,联结机构806配备有摩擦弹簧809。
[0518]
8j:更具体地,应用计时码表联结机构作为联结机构806,其包括夹持件821,它的功能是在柱轮840的控制下确保联结和脱离联结,所述柱轮840控制夹持臂821、822的角度偏移以打开或关闭夹持件,其分别对应于脱离联结或联结。
[0519]
8k:更具体地,使用三阶段控制机构。
[0520]
8l:更具体地,使用包括至少一个柱轮840的控制机构。
[0521]
第九变型涉及用于小时和分钟显示器的逐步时间设置机构和方法。本发明提出了最佳网投方案,如第七和第八变型中所述,在重置到基准位置(特别是12时00分)之后,以两分钟步级实现手表的显示器的时间设置功能。它由交感座钟的接口控制,交感座钟的用于时间设置的数据采集机构如上文第六变型中所述。
[0522]
同样地,它是关于针对手表和座钟之间的接口(例如校正器)的第一位移允许执行一个循环,该循环随时在手表中执行以下功能:
[0523]-通过相对于原始位置(例如12时00分)定义的一定数量步级,将显示器返回到对应于当前时间的位置;
[0524]-将显示器返回到对应于当前时间加上一定偏移的位置,该偏移允许等待释放手表谐振器的秒信号,以用于精确时间设置。
[0525]
本说明书涉及以两分钟步级设置时间的机构的最佳网投非限制性结构。1分钟、3分钟、4分钟、5分钟、6分钟和10分钟的步级也是可能的。
[0526]
所述手表包括:
[0527]-校正器932,其与座钟的接口或允许传递往复运动的另一元件对应;
[0528]-摇杆931,其包括能够以往复运动驱动分轮的齿的臂921;
[0529]-跳簧904,其在驱动功能的间隔内保持分钟显示器的位置;
[0530]-30齿星形轮,其由分钟显示器承载以用于两分钟步级,方式与第七变型相似;
[0531]-在显示齿轮系905
ꢀ‑
907-908和最终齿轮系910之间的联结机构906,其处于打开位置以设置时间,并且能够在手表工作时被关闭,其方式类似于第七或第八变型。
[0532]
在附图所示的特定实施例中,有利地使用了15齿分轮905,这也是替代30齿星形轮所必需的。这种选择不是限制性的,星形轮必须根据所希望的每分钟步级数来定义。ze=60分钟/2分钟。因此,由于图25中描绘的双跳簧904以及摇杆931的臂921的两个偏移的支靠表面922和923的分级布置,15齿分轮具有30个稳定位置。
[0533]
因此,在初始状态下,第一稳定位置对应于重置到基准位置(也就是说,在此示例中为12时00分)之后获得的显示。
[0534]
如图24所示,联结离合器相对于最终齿轮系910处于打开位置。因此,显示独立于手表的齿轮系。在该功能期间,此齿轮系还被停止杆止动。
[0535]
关于时间设置功能,根据第六变型,座钟通过其接口以两分钟步级传递到达当前时间所需的限定数量的位移。它还传递一个或两个额外的步级,以允许在秒信号之前的等待时间。
[0536]
座钟的接口与手表的校正器932协作,校正器932驱动摇杆931。该摇杆931被构造成以一个步级驱动30齿星形轮,或者在替代实施例中,以半个步级驱动15齿小齿轮。
[0537]
摇杆931驱动15齿小齿轮80%的步级,并返回其休止位置,然后跳簧确保剩余的行程,其中执行剩余的20%步级,并且,定位小齿轮以用于下面的半个步级,如图25所示。
[0538]
此实施例响应于所希望的时间设置功能,它允许座钟将显示器以两分钟步级移位到当前时间,并且添加一定偏移。
[0539]
简而言之,用于小时和分钟显示器的逐步时间设置的方法包括下述不同步骤。
[0540]
9a:定义显示器的基准位置。
[0541]
9b:应用包括校正器932、摇杆931以及跳簧904的手表200,校正器932与座钟100的接口协作以传递往复运动,摇杆931能够通过往复运动驱动分钟显示器5的分轮的齿,跳簧904在驱动功能的间隔内保持分钟显示器的位置,手表200还包括在显示齿轮系905、907、908和最终齿轮系910之间的联结机构906。并且,在任何时候,座钟100都能够将显示器4、5返回到对应于在座钟100上读取的当前时间的位置,这通过摇杆931驱动分钟显示器5的齿行进相对于基准位置限定的一定数量步级实现,或者,座钟100将显示器4、5返回到对应于当前时间加上一定偏移的另一个位置,所述偏移允许等待秒信号,该秒信号允许停止机构20从手表200释放谐振器10,这通过以下过程实现:由摇杆931对分钟显示器5进行部分驱动,其仅执行对应于每个齿的行程的一部分,然后在跳簧904的脉冲/冲击作用下执行每个齿的剩余行程以完成分钟显示器5的实现分度定位的旋转。
[0542]
9c:确定预定的时间设置步级值。
[0543]
9d:手表200的分轮或分钟轮通过与分轮或分钟轮成一体的星形轮和具有一个或多个齿的跳簧的组合来精确定位,星形轮的齿数和跳簧的齿数一起限定了预定步级的值。
[0544]
9e:更具体地,手表200的分轮或分钟轮由与分轮或分钟轮成一体的星形轮和摇杆或驱动器或齿条的组合来驱动,其运动由座钟100控制。
[0545]
9f:更具体地,在第一阶段,座钟100控制停止机构20停止谐振器10,将显示器4、5返回到基准位置,并将联结机构906相对于最终齿轮系910定位在打开位置,则最终齿轮系910独立于手表200的齿轮系。
[0546]
9g:更具体地,在第二阶段,座钟100通过其接口以整数个预定步级传递到达当前时间所需的限定数量的位移。
[0547]
9h:更具体地,在第二阶段,座钟100通过其接口以整数个预定步级加上一个或两个位移传递到达当前时间所需的限定数量的位移,所述一个或两个位移对应于允许在秒信号之前的等待时间的一个或两个附加预定步级,所述秒信号允许停止机构20释放手表200的谐振器10。
[0548]
9i:更具体地,应用这样的手表200:其摇杆931被设置成以一个步级驱动30齿星形轮,或者以半个步级驱动15齿小齿轮。
[0549]
9j:更具体地,应用这样的手表200:其摇杆931被设置成以半个步级驱动15齿小齿轮,即驱动15齿小齿轮80%的行程,并返回其休止位置,跳簧904确保当前行程的剩余20%,并定位15齿小齿轮以用于下一个半步级。
[0550]
9k:更具体地,应用这样的手表200:该手表包括用于以恒定步级设置时间的机构,并且包括校正器932、摇杆931、跳簧904、星形轮、联结机构906,校正器932与座钟100的接口
或允许传递往复运动的另一元件对应,摇杆931能够通过往复运动驱动分轮的齿,跳簧904被布置成在驱动功能的间隔内保持分钟显示器的位置,星形轮由分钟显示器承载并且具有取决于所需步级的值的齿数,联结机构906位于显示齿轮系905、907、908和最终齿轮系910之间,该联结机构906处于打开位置以用于时间设置,并且可以在手表200运行时关闭,座钟100的接口被设置成与手表200的校正器932协作,校正器932驱动摇杆931,摇杆931被设置成以一个步级或半个步级驱动星形轮。
[0551]
9l:更具体地,应用这样的手表200:其星形轮由分钟分轮形成。
[0552]
第七变型和第八变型采用功能控制器,以确保在不同阶段执行功能:
[0553]
在第七变型中,功能控制器具有三个位置:
[0554]-功能的启动:它控制最终齿轮系脱离联结,停止摆轮,并释放锤件;
[0555]-时间设置功能:它对锤件赋能;
[0556]-功能的结束:它释放离合联结器和摆轮。
[0557]
在第八变型中,控制器具有两个位置:
[0558]-功能的启动:它控制最终齿轮系脱离联结,并且停止摆轮;
[0559]-功能的结束:它释放离合联结器和摆轮。
[0560]
本发明以非限制性方式提出了各种实施例,其具有集成到手表中的特定控制器,类似于在计时码表中使用的控制器,或者具有在手表外部的集成到座钟中的控制器。对于集成到手表中的控制器,可以使用:
[0561]-柱轮型旋转控制器,其由接口控制(具有二到五个相继的稳定位置:1-2-3-1-2-3-1等)。
[0562]-梭子型的往复控制器,其由接口控制(两个相继的稳定位置:1-2-1-2-1等)。
[0563]
当控制器位于座钟内时,手表仅包括由接口控制并默认返回休止的往复凸轮(一个稳定的休止位置,以及一至三个受控位置:1-2-3-2-1-2-3等)。
[0564]
借助于柱轮实施非常适合第七变型。例如,选择具有三个位置的柱轮,所述三个位置由座钟通过交感接口相继选择。这个柱轮以计时码表的方式控制三个摇杆,这些摇杆控制离合联结器、停止杆和一个或多个锤件,或者这些摇杆是这些机构的一部分。这些摇杆构造成搁置在柱轮的柱体上以便在需要时被启动。
[0565]
所述不同的位置是:
[0566]-位置0:初始和最终位置:启用离合联结器、停用停止杆并且对锤件赋能;
[0567]-位置1:返回基准位置,特别是12时00分:停用离合联结器、启用停止杆并且释放锤件;
[0568]-位置2:时间设置:停用离合联结器、启用停止杆并且对锤件赋能;
[0569]-位置0:完全旋转后返回。
[0570]
此实施例可以应用于具有两位置柱轮的第八变型。
[0571]
具有简单梭子的第二实施例对于两个位置足够的第八变型来说是足够的,并且可以代替柱轮。
[0572]
控制器位于座钟内的实施例非常适合第七变型:前面描述的三位置柱轮在功能上被位于座钟内的三级蜗形轮代替。该蜗形轮控制手表中往复运动的凸轮。该凸轮根据需要控制离合联结器、停止杆和一个或多个锤件。
[0573]
所述不同的位置是:
[0574]-位置0:初始和最终位置:启用离合联结器、停用停止杆并且对锤件赋能;
[0575]-位置1:返回基准位置,特别是12时00分:停用离合联结器、启用停止杆并且释放锤件;
[0576]-位置2:时间设置:停用离合联结器、启用停止杆并且对锤件赋能;
[0577]-位置0:凸轮归零。
[0578]
这个在手表外部具有控制器的实施例具有意义,因为当手表意外地从座钟上移开时(在功能执行期间),它防止手表保持在位置1或位置2。
[0579]
该结构适于当在返回位置0期间经过位置1时避免锤件下落。
[0580]
控制器位于座钟内的此实施例可以应用于第八变型,其具有蜗形轮和两位置凸轮。
[0581]
简而言之,这种控制器响应于期望的时间设置功能,允许显示器与最终齿轮系脱离联结以及它们的联结,允许必要时控制锤件,并且允许控制停止杆。
[0582]
当然,这种控制器的使用也适用于上述其他变型。
[0583]
因此,这些不同的变型允许实现以下功能:
[0584]-当手表放在座钟上时,启动停止的手表;
[0585]-当手表从钟表取下佩戴时,确保至少12小时的电池寿命;
[0586]-当手表在座钟上时,保持手表运转;
[0587]-在手表被放在座钟上时或根据请求对手表设置时间,精度约为
±
15秒;
[0588]-只要手表在座钟上,就保持手表准时;
[0589]-可选地,交感组件1000可选地包括脱离联结机构,以便能够停用所述功能以将停止的手表存储在座钟上。
[0590]
更具体地,第一接口包括在座钟内的第一外部致动器和在手表中的第一内部致动器。
[0591]
类似地,第二接口包括在座钟内的第二外部致动器和在手表中的第二内部致动器。
[0592]
类似地,第三接口包括在座钟内的第三外部致动器和在手表中的第三内部致动器。
[0593]
同样,如果我们推广到更多数量的接口,则第n接口包括在座钟内的第n外部致动器和在手表中的第n内部致动器。
[0594]
如上所述,对应于如此多不同使用场景的交感组件以及不同方法是基于不包括报时的座钟和手表。
[0595]
应理解,使用报时座钟和/或报时手表来制造这种交感组件是可能的。
[0596]
报时机构的优势在于为时间设置提供精确的参考,可以设想用它对交感手表进行时间设置。
[0597]
但是,必须采取预防措施。
[0598]
在以五分钟步级进行时间设置的例子中,报时蜗形轮可用于时间设置机构,对应的蜗形轮必须具有144个五分钟步级,并且将不会用于报时。在报时当中,小时蜗形轮原则上随着突然作用件机构跳变,因此先验的来说甚至驱动也是特定的。所述手表可以是报时
手表,但是这使得系统有点复杂,因为在交感座钟100和交感手表200协作的交感操作期间,有必要隔离报时,这是因为报时会在时间设置期间发生连续击打,并可能导致机构堵塞。
[0599]
在这种使得实施更加复杂的插入隔离装置的条件下,生产这样最佳网投用于报时手表的机构是可能的;则手表的报时蜗形轮将由交感时间设置驱动。
[0600]
在本说明书中仅解释了基本的上条和时间设置功能,通过外推,当然可以传递关于其他变量的其他信息:第二时区、昼夜显示、上午/下午、日期、以及更一般的日历元素、等等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1