一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器
1.本实用新型属于水下仿生机器人技术领域,具体涉及一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器。
背景技术:
2.水下机器人作为高效的水下平台在海洋开发与利用中起到了至关重要的作用。水下推进技术作为水下机器人的关键技术之一,一直以来都是国内外科研机构关注的重点。蝠鲼运动在推进效率、转弯机动性、游动稳定性等方面,体现出胸鳍升力推进模式具有较为明显优势,仿生蝠鲼式潜航器因为噪声小、效率高、隐蔽性强等优势收到关注。
3.但现有的仿生蝠鲼式水下潜航器,甚至是常规潜航器都没能完美的解决能源补充问题,潜航器内配置的众多耗能的功能模块,储能电池提供的有限能量大大制约了潜航器的工作时间与工作范围。同时较短的工作时间使得操作人员不得不频繁去海上更换潜航器电池,这加重了工作人员的负担,极大降低了工作效率。
技术实现要素:
4.本实用新型的目的在于提供一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,以解决但现有的仿生蝠鲼式水下潜航器,甚至是常规潜航器都没能完美的解决能源补充问题,潜航器内配置的众多耗能的功能模块,储能电池提供的有限能量大大制约了潜航器的工作时间与工作范围。同时较短的工作时间使得操作人员不得不频繁去海上更换潜航器电池,这加重了工作人员的负担,极大降低了工作效率的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,包括航行器壳体,所述航行器壳体形状设置为仿蝠鲼外形的流线形,所述航行器壳体两侧均设置有胸鳍,两个所述胸鳍上均设置有多个压电薄膜,所述航行器壳体内部设置有平衡机构,所述压电薄膜电性连接有储能结构。
6.优选的,还包括安装平台,所述平衡机构包括两个分别设置于安装平台两侧的水箱,所述安装平台底部固定设置有水泵,所述水泵的一端与水箱之间固定设置有乳胶管道并且通过乳胶管道相互连通,所述水泵的另一端贯穿航行器壳体延伸至外侧与外界连通。
7.优选的,所述航行器壳体还设置有压电薄膜控制器,所述胸鳍为柔性材料。
8.优选的,所述胸鳍上下分别均匀的附着有五条压电薄膜。
9.优选的,所述储能结构包括但不限于储能电池。
10.优选的,所述柔性材料包括硅胶和/橡胶。
11.本实用新型的技术效果和优点:通过在水面待机时,蝠鲼式无人航行器的柔性胸鳍在波浪的作用下发生应变,使胸鳍上附着的压电薄膜发生变形,通过压电薄膜的压电效应产生电能,实现波浪能向电能的转换,将电能储存,有效改善机器鱼水下续航的能力,进而减轻操作人员负担、提高工作效率,同时增加无人航行器的隐蔽性。
附图说明
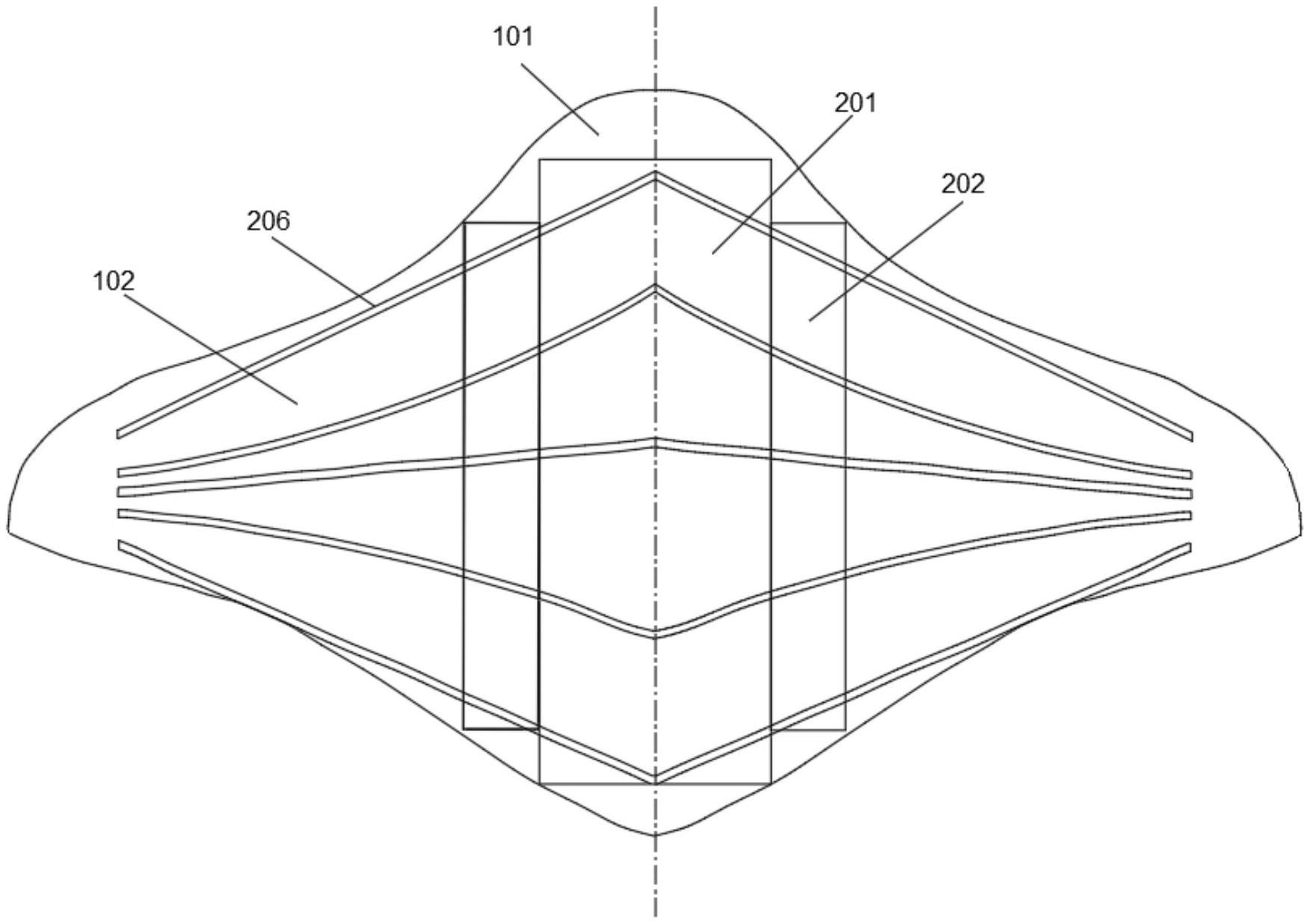
12.图1为本实用新型的基于压电薄膜的波浪能捕获蝠鲼式无人航行器的构型主视二维图;
13.图2为本实用新型的基于压电薄膜的波浪能捕获蝠鲼式无人航行器设计的俯视二维图。
14.图中:101、航行器壳体;102、胸鳍;201、压电薄膜控制器;202、水箱;203、储能结构;204、安装平台;205、水泵;206、压电薄膜。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.本实用新型提供了如图中所示的一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,包括航行器壳体101,航行器壳体101形状设置为仿蝠鲼外形的流线形,航行器壳体101两侧均设置有胸鳍102,两个胸鳍102上均设置有多个压电薄膜206,胸鳍102上下分别均匀的附着有五条压电薄膜206,航行器壳体101内部设置有平衡机构,压电薄膜206电性连接有储能结构203,储能结构203包括但不限于储能电池。
17.具体的,还包括安装平台204,平衡机构包括两个分别设置于安装平台204两侧的水箱202,安装平台204底部固定设置有水泵205,水泵205的一端与水箱202之间固定设置有乳胶管道并且通过乳胶管道相互连通,水泵205的另一端贯穿航行器壳体101延伸至外侧与外界连通。
18.具体的,航行器壳体101还设置有压电薄膜控制器201,胸鳍102为柔性材料,柔性材料包括硅胶和/橡胶。
19.工作原理:当潜航器在水面待机时,压电薄膜206在波浪作用下发生形变,在压电效应下将波浪能转换为电能,为潜航器储能,增加航行器续航能力。
20.在胸鳍部分的设计中,将压电薄膜206附着在胸鳍102,左右胸鳍上下表面各均匀分布5条压电薄膜,在水面待机时,能够充分吸收波浪能的能量,进行能量的转换,将波浪能转换为电能储存在储能结构203中;在水中运动时,通过压电薄膜控制器201充分控制压电薄膜形变,利用胸鳍的变形带动航行器高效运动。
21.在基于压电薄膜的波浪能捕获蝠鲼式无人航行器的安装平台204两边安装水箱202,下方安装水泵(205),水泵的一个端口通过乳胶管与水箱202连接,另一端口则通过主体开口与外部相连,通过控制水泵泵水和排水,改变水箱中的水量进而控制航行器重量,控制航行器上升与下潜;
22.整体实现了在水面待机时,蝠鲼式无人航行器的柔性胸鳍在波浪的作用下发生应变,使胸鳍上附着的压电薄膜发生变形,通过压电薄膜的压电效应产生电能,实现波浪能向电能的转换,将电能储存,有效改善机器鱼水下续航的能力,进而减轻操作人员负担、提高工作效率,同时增加无人航行器的隐蔽性。
23.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本
实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,包括航行器壳体(101),其特征在于:所述航行器壳体(101)形状设置为仿蝠鲼外形的流线形,所述航行器壳体(101)两侧均设置有胸鳍(102),两个所述胸鳍(102)上均设置有多个压电薄膜(206),所述航行器壳体(101)内部设置有平衡机构,所述压电薄膜(206)电性连接有储能结构(203),还包括安装平台(204),所述平衡机构包括两个分别设置于安装平台(204)两侧的水箱(202),所述安装平台(204)底部固定设置有水泵(205),所述水泵(205)的一端与水箱(202)之间固定设置有乳胶管道并且通过乳胶管道相互连通,所述水泵(205)的另一端贯穿航行器壳体(101)延伸至外侧与外界连通。2.根据权利要求1所述的一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,其特征在于:所述航行器壳体(101)还设置有压电薄膜控制器(201),所述胸鳍(102)为柔性材料。3.根据权利要求1所述的一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,其特征在于:所述胸鳍(102)上下分别均匀的附着有五条压电薄膜(206)。4.根据权利要求1所述的一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,其特征在于:所述储能结构(203)包括但不限于储能电池。
技术总结
本实用新型公开了一种基于压电薄膜的波浪能捕获蝠鲼式无人航行器,包括航行器壳体,所述航行器壳体形状设置为仿蝠鲼外形的流线形,所述航行器壳体两侧均设置有胸鳍,两个所述胸鳍上均设置有多个压电薄膜,所述航行器壳体内部设置有平衡机构,通过在水面待机时,蝠鲼式无人航行器的柔性胸鳍在波浪的作用下发生应变,使胸鳍上附着的压电薄膜发生变形,通过压电薄膜的压电效应产生电能,实现波浪能向电能的转换,将电能储存,有效改善机器鱼水下续航的能力,进而减轻操作人员负担、提高工作效率,同时增加无人航行器的隐蔽性。同时增加无人航行器的隐蔽性。同时增加无人航行器的隐蔽性。
技术研发人员:杨鹏
受保护的技术使用者:华中科技大学
技术研发日:2022.11.03
技术公布日:2023/7/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1