一种视觉导航机器人下位机通讯系统的制作方法
1.本实用新型属于智能机器人技术领域,具体涉及一种视觉导航机器人下位机通讯系统。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.目前各类工业机器人、服务型机器人已经广泛应用于社会生产、生活的各个方面,为生产生活带来了极大的便捷。其中应用最广泛的是应用于各类搬运、巡检、清扫等应用场景的机器人设备。在机器人设计开发领域中,机器人自动行走系统是各类机器人产品开发的重点,直接影响机器人行走路线规划、自动导航、自动巡航等功能,该自动行走系统多为轮式结构,根据应用场景不同可使用多种底盘结构,该类自行走底盘搭载摄像头、机械臂、清洁装置等设备后,将直接转化为各类工业、服务类机器人。
4.下位机是直接控制设备获取设备状况的计算机,上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。下位机不时读取设备状态数据,转化成数字信号反馈给上位机。两机如何通讯,一般取决于下位机。下位机一般具有更可靠的独有通讯协议。
5.对于目前应用于机器人中的下位机系统,其往往存在模块过于复杂、下位机驱动板体积过大的问题,同时其驱动程序的开发也难度较大,不便于用户进行个性化开发。
技术实现要素:
6.本实用新型的目的在于:
7.为解决现有技术中的下位机通讯系统为实现多功能,包含模块过于复杂,导致开发难度大,用户难以进行个性化开发的问题,提供一种视觉导航机器人下位机通讯系统。
8.本实用新型采用的技术方案如下:
9.一种视觉导航机器人下位机通讯系统,包括下位机驱动板,所述下位机驱动板上安装有:
10.通讯驱动模块,包括用于传递电机转速信息给上位机并根据上位机控制指令控制电机转速的电机驱动模块,和用于传递舵机转向角度信息给上位机并根据上位机控制指令控制舵机转向角度的舵机驱动模块;
11.led灯驱动模块,用于通过单片机驱动led灯;
12.蜂鸣器驱动模块,用于通过单片机驱动蜂鸣器;
13.开关驱动模块,用于通过读取接口电平变化从而读取开关状态;
14.蓝牙驱动模块,用于驱动蓝牙模块;
15.单片机,用于控制驱动板上各单元并对上位机的控制指令进行执行;
16.陀螺仪传感器,用于保持机器人方向并将数据信号回传;
17.数据交互通信模块,包括usb数据接口,用于与上位机之间采用串口通信转usb通信的方式进行数据交互;
18.多个io接口;
19.所述单片机分别与所述多个io接口、通讯驱动模块、led灯驱动模块、蜂鸣器驱动模块、开关驱动模块、蓝牙驱动模块、陀螺仪传感器和数据交互通信模块连接。
20.进一步地,还包括用于控制超声波传感器功能运行的超声波传感器控制模块和用于控制温湿度传感器功能运行的温湿度传感器控制模块,超声波传感器控制模块和温湿度传感器控制模块分别与单片机连接。
21.进一步地,还包括用于控制激光雷达的激光雷达控制模块、用于控制深度视觉相机的深度相机接入控制模块和用于驱动语音识别器的语音控制板驱动模块,激光雷达控制模块、深度相机接入控制模块和语音控制板驱动模块分别与单片机连接。
22.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
23.1、本实用新型的下位机系统通过集成多个机器人功能部件驱动和控制模块的同时,留出了程序烧录口和多个io接口,io接口以排针、串口线等方式引出以供用户二次开发使用,相比于现有的机器人下位机系统为实现机器人各种智能化自动功能而包含了过多复杂的模块,本实用新型的下位机系统具有集成度更高、二次开发操作更简单的优点,为客户实现个性化定制功能提供了便利。
24.2、本实用新型的下位机系统通过各类外设接入联调,确保每个设备数据传输畅通,使得下发的控制指令能够精准执行,保证了视觉导航机器人的运行更加稳定。
附图说明
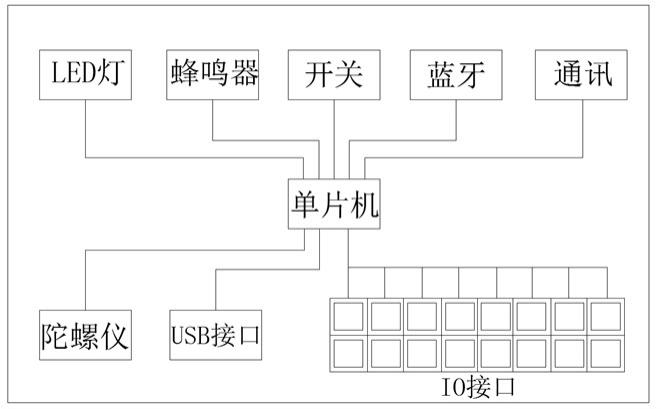
25.图1为本实用新型的下位机模块化示意图。
26.图2为本实用新型单片机主控电路原理图;
27.图3为本实用新型电源管理电路原理图;
28.图4为本实用新型两后轮电机驱动器电路原理图;
29.图5为本实用新型两路usb接口电路原理图。
具体实施方式
30.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
31.一种视觉导航机器人下位机通讯系统,包括下位机驱动板,如图1所示,所述下位机驱动板上安装有:
32.通讯驱动模块,包括用于传递电机转速信息给上位机并根据上位机控制指令控制电机转速的电机驱动模块,和用于传递舵机转向角度信息给上位机并根据上位机控制指令控制舵机转向角度的舵机驱动模块;
33.led灯驱动模块,用于通过单片机驱动led灯;
34.蜂鸣器驱动模块,用于通过单片机驱动蜂鸣器;
35.开关驱动模块,用于通过读取接口电平变化从而读取开关状态;
36.蓝牙驱动模块,用于驱动蓝牙模块;
37.单片机,用于控制驱动板上各单元并对上位机的控制指令进行执行;
38.陀螺仪传感器,用于保持机器人方向并将数据信号回传;
39.数据交互通信模块,包括usb数据接口(如图5所示),用于与上位机之间采用串口通信转usb通信的方式进行数据交互;
40.多个io接口;
41.所述单片机分别与所述多个io接口、通讯驱动模块、led灯驱动模块、蜂鸣器驱动模块、开关驱动模块、蓝牙驱动模块、陀螺仪传感器和数据交互通信模块连接。
42.下位机拟基于stm32单片机进行开发,如图2所示,驱动板mcu可选用stm32f103rct6,板载mpu6050 imu角速度陀螺仪传感器,支持4路直流电机闭环驱动控制,一路超声波传感器控制,两路舵机驱动控制,一路温湿度传感器,一路蓝牙控制,swd固件程序烧录口,其余io接口以排针、串口线等方式引出以供用户二次开发使用。
43.下位机主要进行电源控制(如图3所示的电路图)、imu数据读取、电机驱动开发(如图4所示的电机驱动器电路图)、舵机驱动开发等工作,与上位机之间采用串口通信转usb通信的方式进行数据交互,下位机主要作用为将上位机的决策进行有效执行。
44.下位机系统采用机器人驱动板,与上位机采用rosserial协议进行通信,整体通信协议基于标准rosserial协议,调用库函数api,用户可通过自定义消息来实现数据通信。下位机在实施中将首先进行硬件原理图设计、pcb设计、pcb制版与测试等工作,之后基于自研的驱动板进行下位机控制程序开发,控制程序将全部以c++编译实现并烧录至stm32单片机。
实施例一
45.作为一种优选的方式,下位机系统还包括用于控制超声波传感器功能运行的超声波传感器控制模块和用于控制温湿度传感器功能运行的温湿度传感器控制模块,超声波传感器控制模块和温湿度传感器控制模块分别与单片机连接。
实施例二
46.作为一种优选的方式,下位机系统还包括用于控制激光雷达的激光雷达控制模块、用于控制深度视觉相机的深度相机接入控制模块和用于驱动语音识别器的语音控制板驱动模块,激光雷达控制模块、深度相机接入控制模块和语音控制板驱动模块分别与单片机连接。
47.上位机、下位机通信联调时,配合串口调试工具等辅助工具测试上位机、下位机串口通信是否正常,数据发送是否准确,格式是否正确,相互之间能否实现数据互动、互控。上位机下位机联调成功后,将按顺序进行电机接入、转向舵机接入、激光雷达接入、深度相机接入、语音控制板接入等各类外设接入联调,确保每个设备数据传输畅通,下发的控制指令能够精准执行。
48.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型
的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1