一种视觉引导机器人上下料装置的制作方法
1娱乐游戏涉及上下料设备技术领域,具体涉及一种视觉引导机器人上下料装置。
背景技术:
2.轴承是当代机械设备中一种重要的零部件,它的主要功能是支撑机械旋转体,降低其运动过程中的摩擦系数,并保证其回转精度,轴承一般由内圈、外圈、滚动体和保持架组成,在轴承加工时,需要对外圈、内圈使用研磨机进行表面研磨,从而保证产品质量。
3.目前,对轴承内圈或者外圈研磨的工序,一般为人工进行上下料,人工将完成加工的内圈或者外圈放置在研磨机中,研磨完成后,再通过人工取出,此种方式不仅效率低下,成本高,同时还可能导致加工过程存在失误的情况。
4.后来,出现了一些轴承研磨自动上下料的设备,取代人工进行上下料,如授权公告号cn215092896u的实用新型专利,公开了一种上端面研磨机自动上下料工作台,通过设置转运盘、转运机械臂和上下料机械臂,从而完成轴承的上料和下料,实现上下料的自动化,但是,在实际使用中,此种上下料方式的结构复杂,上料需要一套机械臂,下料也需要一套机械臂,不仅成本高,效率也无法得到保证,同时上料和下料采用传送带方式,占地面积大、完成研磨后依然需要对轴承进行整理收纳,存在使用不便的问题。
技术实现要素:
5娱乐游戏的目的是提供一种视觉引导机器人上下料装置,解决目前轴承研磨上下料过程中存在的上述问题。
6.为实现上述目的,本实用新型采用如下技术方案:
7.一种视觉引导机器人上下料装置,包括机架、上下料机械臂和轴承外圈储料机构,所述上下料机械臂和所述轴承外圈储料机构均设置在所述机架上,所述轴承外圈储料机构用于存放待研磨和研磨后的轴承外圈,所述上下料机械臂上设置有夹爪机构和视觉识别装置,所述夹爪机构用于在所述轴承外圈储料机构和研磨机之间转运轴承外圈;所述夹爪机构包括安装板和夹爪,所述夹爪设置有多个,各所述夹爪周向设置在所述安装板上,所述夹爪上周向设置有爪头,所述爪头伸缩以卡接轴承外圈的内壁。
8.进一步地,所述视觉识别装置包括摄像头和光源,所述安装板下方设置有固定板,所述摄像头设置在所述固定板上,并位于各所述夹爪围合区域中,所述光源设置在所述摄像头外侧。
9.进一步地,所述轴承外圈储料机构包括供料机构和收料机构,所述供料机构和所述收料机构均设置在所述机架上;所述供料机构包括供料托盘、第一驱动柱和第一导向柱,所述第一驱动柱与所述供料托盘连接,用于驱动所述供料托盘上下移动,所述第一导向柱设置在所述机架上,用于对所述供料托盘的上下移动进行导向;所述收料机构包括收料托盘、第二驱动柱和第二导向柱,所述第二驱动柱与所述收料托盘连接,用于驱动所述收料托
盘上下移动,所述第二导向柱设置在所述机架上,用于对所述收料托盘的上下移动进行导向。
10.进一步地,所述供料托盘的边缘周向设置有第一缺口,所述第一导向柱卡接在所述第一缺口中,所述供料托盘上设置有第一限位孔,所述供料机构还包括第一限位杆,所述第一限位杆设置在所述机架上,其上端穿过所述第一限位孔设置。
11.进一步地,所述收料托盘的边缘周向设置有第二缺口,所述第二导向柱卡接在所述第二缺口中,所述收料托盘上设置有第二限位孔,所述收料机构还包括第二限位杆,所述第二限位杆设置在所述机架上,其上端穿过所述第二限位孔设置。
12娱乐游戏的有益效果:
13娱乐游戏的视觉引导机器人上下料装置,通过轴承外圈储料机构,能够存储待研磨和研磨后的轴承外圈,从而能够减少进料和收料机构的占地面积,同时通过上下料机械臂上设置的夹爪机构和视觉识别装置,能够对轴承外圈进行夹取进料和回收,结构简单高效,能够实现轴承外圈在研磨时的高效上下料。
附图说明
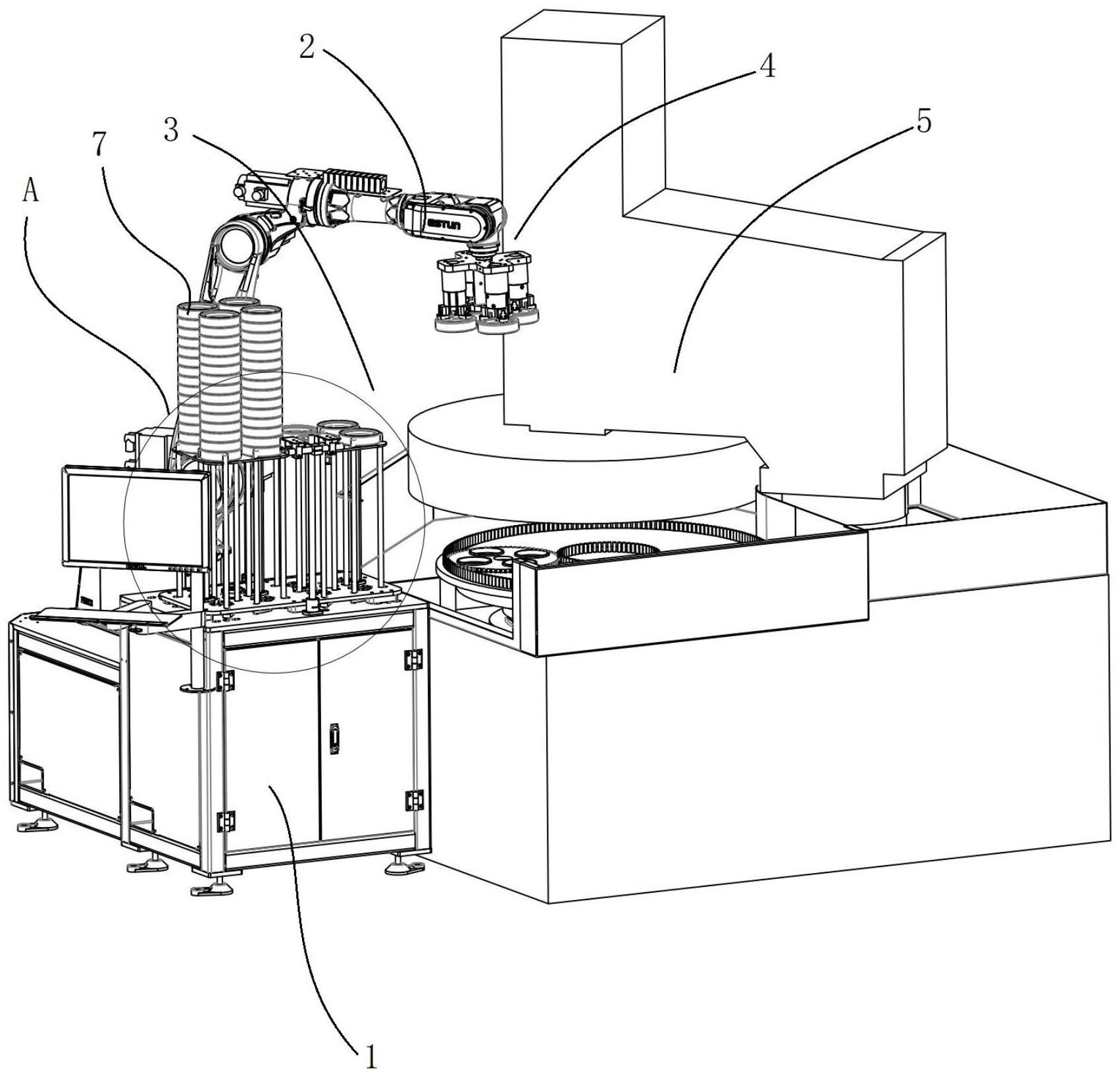
14.图1是本实用新型视觉引导机器人上下料装置使用场景的结构示意图;
15.图2是图1中a处的结构示意图;
16.图3是本实用新型视觉引导机器人上下料装置中夹爪机构夹取轴承外圈状态的结构示意图;
17.图4是本实用新型视觉引导机器人上下料装置中夹爪机构的结构示意图。
18.图中各标记对应的名称:
19.1、机架,2、上下料机械臂,3、轴承外圈储料机构,311、供料托盘, 312、第一驱动柱,313、第一导向柱,314、第一缺口,315、第一限位孔,316、第一限位杆,321、收料托盘,322、第二驱动柱,323、第二导向柱,324、第二缺口,325、第二限位孔,326、第二限位杆,4、夹爪机构,41、安装板,42、夹爪,43、爪头,5、研磨机,61、摄像头,62、光源,63、固定板,7、轴承外圈。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21娱乐游戏的实施例1:
22.本实施例中的视觉引导机器人上下料装置,是通过上下料机械臂和轴承外圈储料机构的配合,实现对轴承外圈的快速抓取和回收,提高轴承外圈的研磨效率。
23.具体地,如图1-图4所示,视觉引导机器人上下料装置,包括机架1、上下料机械臂2和轴承外圈储料机构3,上下料机械臂2和轴承外圈储料机构3均设置在机架1上,轴承外圈储料机构3能够存放待研磨的轴承外圈7,同时也能够将研磨好的轴承外圈7进行收料,在上下料机械臂2上设置有夹爪机构4和视觉识别装置,通过夹爪机构4进行轴承外圈7的夹取,并通过视觉识别装置对轴承外圈7放置的位置进行识别,以对机械臂进行引导,从而提高上料的准确性。
24.在实际使用时,机架1设置在研磨机5一侧,首先加工好的轴承外圈7上下堆叠在轴承外圈储料机构3上,然后上下料机械臂2将待加工的轴承外圈7通过夹爪机构4抓取,通过上下料机械臂2的移动,将轴承外圈7移动到研磨机5上方,在研磨机5中设置有对应的轴承外圈放置槽,在轴承外圈7被放置在轴承外圈放置槽之前,先通过视觉识别装置进行图像抓取识别,以便于引导上下料机械臂2调整位置,从而将轴承外圈7准确地放置在研磨机5中,本实施例中,通过视觉识别装置引导机械臂移动的原理和具体工作方式,属于现有技术,在此不再赘述。
25.如图3和图4所示,本实施例中,夹爪机构4包括安装板41和夹爪42,夹爪42设置有四个,各夹爪42周向设置在安装板41上,在夹爪42下端周向设置有爪头43,通过爪头43沿夹爪42的径向方向伸缩,从而夹紧轴承外圈7的内壁,从而便于对轴承外圈7进行移动,同时通过设置四个夹爪42,能够一次实现对四个轴承外圈7的夹取转移,进一步提高工作效率。
26.本实施例中,视觉识别装置包括摄像头61和光源62,安装板41下方设置有固定板63,摄像头61设置在固定板63上,并位于各夹爪的围合区域中,光源62设置在摄像头61的外侧,通过将摄像头61设置在中心位置,使得各夹爪42不会对摄像头61的拍摄视野造成干涉,并通过设置光源62对图形采集区域及时补光,提高图像采集效果。
27.如图2所示,轴承外圈储料机构3包括供料机构和收料机构,供料机构和收料机构均设置在机架1上,供料机构包括供料托盘311、第一驱动柱312和第一导向柱313,第一驱动柱312与供料托盘311连接,通过第一驱动柱312能够驱动供料托盘311上下移动,使得堆叠在供料托盘311上的轴承外圈7,位于顶层的轴承外圈7始终保持在同一高度,保证上下料机械臂2抓取的便利性,减少上下料机械臂2的移动距离,提高工作效率。同时,第一导向柱313设置在机架1上,能够起到对供料托盘311上下移动进行导向的作用,保证供料托盘311上下移动的稳定性。收料机构包括收料托盘321、第二驱动柱322和第二导向柱323,第二驱动柱322与收料托盘321连接,通过第二驱动柱322能够驱动收料托盘321上下移动,使得在上下料机械臂2进行收料时,轴承外圈7被放置在同一高度,保证上下料机械臂2抓取放置的便利性,减少上下料机械臂2的移动距离,提高工作效率。同时,第二导向柱323设置在机架1上,能够起到对收料托盘321的上下移动进行导向的作用,保证收料托盘321上下移动的稳定性。
28.本实施例中,在供料托盘311的边缘周向设置有第一缺口314,第一导向柱313卡接在第一缺口314中,从而实现对供料托盘311的导向,在供料托盘311上设置有第一限位孔315,供料机构还包括第一限位杆316,第一限位杆316设置在机架1上,第一限位杆316的上端穿过第一限位孔315设置。
29.本实施例中,将轴承外圈7放置在供料托盘311上之后,第一限位杆316位于轴承外圈7外侧,起到对轴承外圈7的限位作用,保证轴承外圈7上下堆叠的整齐。
30.如图2所示,收料托盘321的边缘周向设置有第二缺口324,第二导向柱323卡接在第二缺口324中,收料托盘321上设置有第二限位孔325,收料机构还包括第二限位杆326,四儿限位杆设置在机架1上,其上端穿过第二限位孔325设置。
31.本实施例中,将轴承外圈7放置在收料托盘321上之后,第二限位杆326位于轴承外圈7外侧,起到对轴承外圈7的限位作用,保证轴承外圈7上下堆叠的整齐。
32.工作原理:
33.在进行轴承外圈7的研磨时,首先将加工好的轴承外圈7放置在供料托盘311上,一层四个,上下堆叠设置,放置完成后,启动上下料机械臂2,上下料机械臂2移动到供料托盘311上方,然后控制夹爪42下降,将爪头43伸入轴承外圈7的内部,此时爪头43伸出,夹紧轴承外圈7的内壁,即可将轴承外圈7夹起,可同时夹起四个轴承外圈7,轴承外圈7被夹起后,供料托盘311随着上升,机械臂夹取轴承外圈7,将轴承外圈7转运至研磨机5上方,然后摄像头61工作,对研磨机5中的轴承外圈放置槽进行拍照,然后根据轴承外圈放置槽的位置引导上下料机械臂2将轴承外圈7放置到位,然后上下料机械臂2返回,重复以上动作,即可完成轴承外圈7的放置,然后研磨机5对轴承外圈7的端面进行研磨,研磨完成后,上下料机械臂2将轴承外圈7抓取,放置在收料托盘321上,然后随即移动到供料托盘311上,将供料托盘311上的轴承外圈7再次放入研磨机5中,从而提高工作效率。
34.显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1