一种扫地车用动态避让吸口机构的制作方法
1.本技术涉及垃圾清理设备的技术领域,尤其是涉及一种扫地车用动态避让吸口机构。
背景技术:
2.人们在日常生活中总会产生垃圾废弃物,一些垃圾遗留在交通道路上,影响了城市的形象。城市道路垃圾清理是建设文明城市的重要一环,但人工清理垃圾效率较低,而且道路上交通状况复杂,易对人身安全造成威胁。用扫地车与对路面垃圾进行清理,与人工清理相比能够快捷高效完成清理工作,因此得到了广泛的应用。
3.常见的扫地车在底盘上安装有盘刷、垃圾吸管和风机,通过盘刷对垃圾进行清理,再通过风机在垃圾吸管内产生负压,从而将路面垃圾吸入垃圾箱。当扫地车行驶在不平整的路面时,垃圾吸管会与车身一同上下移动,使得垃圾吸管与路面的距离产生变化,无法保持在合适的位置,使垃圾吸管对垃圾的吸力不稳定,不利于垃圾的吸收清理,导致垃圾清理效果较差。
技术实现要素:
4.为了提升扫地车在不平整路面的清理效果,本技术提供一种扫地车用动态避让吸口机构。
5.本技术提供一种扫地车用动态避让吸口机构,采用如下的技术方案:
6.一种扫地车用动态避让吸口机构,包括安装架、避让组件和垃圾吸收组件,所述安装架包括用于和扫地车底盘连接的连接板;所述垃圾吸收组件包括垃圾吸收罩和若干支撑轮,垃圾吸收罩用于覆盖在垃圾吸管一端的周侧;所述避让组件包括套筒、导向杆和基座板,所述基座板和所述安装架连接,所述套筒和所述基座板固定连接,且所述导向杆滑动设置于所述套筒内,所述导向杆一端转动连接于所述垃圾吸收罩。
7.通过采用上述技术方案,导向杆能够相对于套筒移动,使垃圾吸收罩能够相对于安装架移动,当扫地车行驶在不平整的路面时,支撑轮与路面保持接触,垃圾吸收罩在支撑轮的支撑作用下,能够通过相对于安装架移动来适应路面变化,使垃圾吸收罩与路面的距离较为稳定,使垃圾吸收罩能够保持较稳定的吸力来吸收垃圾,提高垃圾清理效果。
8.可选的,所述安装架还包括升降组件,所述升降组件包括第一驱动源,所述第一驱动源一端与连接板固定连接,所述第一驱动源的输出端与基座板固定连接。
9.通过采用上述技术方案,第一驱动源能够带动基座板移动,从而能够带动垃圾吸收罩和支撑轮移动,在扫地车清理垃圾时,第一驱动源通过移动使支撑轮与路面接触,使垃圾吸收罩能够保持吸力吸收垃圾;在扫地车不清理垃圾时,第一驱动源通过移动使垃圾吸收罩远离路面,降低垃圾吸收罩损坏的可能。
10.可选的,所述导向杆包括滑动连接于套筒内的滑块,所述套筒远离基座板的一端可拆卸连接有能够和滑块相抵的端盖,所述导向杆贯穿所述端盖。
11.通过采用上述技术方案,端盖和基座板可以限制滑块的活动范围,使滑块在端盖和基座板之间滑动。
12.可选的,所述套筒和导向杆设置有多个且一一对应滑动连接,所述导向杆一端球铰接于所述垃圾吸收罩。
13.通过采用上述技术方案,导向杆球铰接于垃圾吸收罩,使垃圾吸收罩能够朝不同方向转动,便于贴合不同坡度的路面。多个导向杆与垃圾吸收罩连接,使垃圾吸收罩能够较为平稳,便于保持较大的吸力吸收垃圾。
14.可选的,所述垃圾吸收罩包括主吸收罩和两个副吸收罩,所述主吸收罩和副吸收罩远离安装架的一端均开设有开口,所述导向杆与主吸收罩连接;所述主吸收罩两侧开设有供副吸收罩滑动的滑槽,所述主吸收罩上设置有用于同时驱动两个副吸收罩相向或相背离移动的驱动组件。
15.通过采用上述技术方案,在驱动组件的带动下,副吸收罩可相对于主吸收罩滑动,使垃圾吸收罩的覆盖范围发生变化,在路面垃圾较小时可扩大垃圾吸收罩的覆盖范围,以提高清理效率;在路面垃圾较大时可缩小垃圾吸收罩的覆盖范围,便于垃圾的吸收清理。
16.可选的,所述驱动组件包括转动连接于所述主吸收罩上的丝杆,所述丝杆为双向丝杆,所述驱动组件包括固定于副吸收罩上的螺母固定座,及用于驱动丝杆转动的第二驱动源,两个所述螺母固定座螺纹连接于所述丝杆的不同螺纹段上。
17.通过采用上述技术方案,第二驱动源带动丝杆转动,从而带动螺母固定座沿丝杆轴向进行移动。丝杆为双向丝杆,可带动两个螺母固定座相向或相背离移动,进而带动两个副吸收罩相向或相背离移动,改变吸取垃圾的范围。
18.可选的,所述第二驱动源的输出轴上同轴固定有主动齿轮,所述丝杆上同轴固定有从动齿轮,所述主动齿轮与从动齿轮啮合。
19.通过采用上述技术方案,第二驱动源与丝杆通过齿轮传动,使第二驱动源的动力平稳传递到丝杆上。
20.可选的,所述主吸收罩设置有限位板,所述限位板位于副吸收罩远离滑槽的一侧,所述限位板能够与副吸收罩抵接。
21.通过采用上述技术方案,限位板能够限制副吸收罩的移动范围,使副吸收罩不易脱离主吸收罩。
22.可选的,所述垃圾吸收罩设置有滑轨,所述滑轨滑动连接有调节板,所述支撑轮设置在所述调节板上。
23.通过采用上述技术方案,调节板能够相对于滑轨移动,使支撑轮能够相对于垃圾吸收罩移动,便于调节垃圾吸收罩到路面的距离,以达到较好的垃圾吸收效果。
24.可选的,所述导向杆位于套筒外的侧壁设置有挡板,所述挡板与端盖间设置有弹簧,所述导向杆贯穿所述弹簧,所述弹簧分别与端盖和挡板抵接。
25.通过采用上述技术方案,当扫地车行驶在不平整路面时,支撑轮带动垃圾吸收罩移动,在垃圾吸收罩带动导向杆上的挡板朝端盖移动时,弹簧受到压缩,对挡板产生朝向路面的力,并通过导向杆传递到垃圾吸收罩和支撑轮上,使支撑轮更易贴合地面。
26.综上所述,本技术包括以下至少一种有益效果:
27.1.支撑轮与不平整的路面保持接触,使垃圾吸收罩带动导向杆上的滑块在套筒内
滑动,使垃圾吸收罩到路面的距离保持稳定,便于垃圾吸收罩保持较大的吸力吸收垃圾,提高了垃圾清理效果;
28.2.副吸收罩能够相对于主吸收罩移动,可调节垃圾吸收的范围;
29.3.调节板能够相对于滑轨移动,使支撑轮能够相对于垃圾吸收罩移动,便于调节垃圾吸收罩到路面的距离,以达到较好的垃圾吸收效果。
附图说明
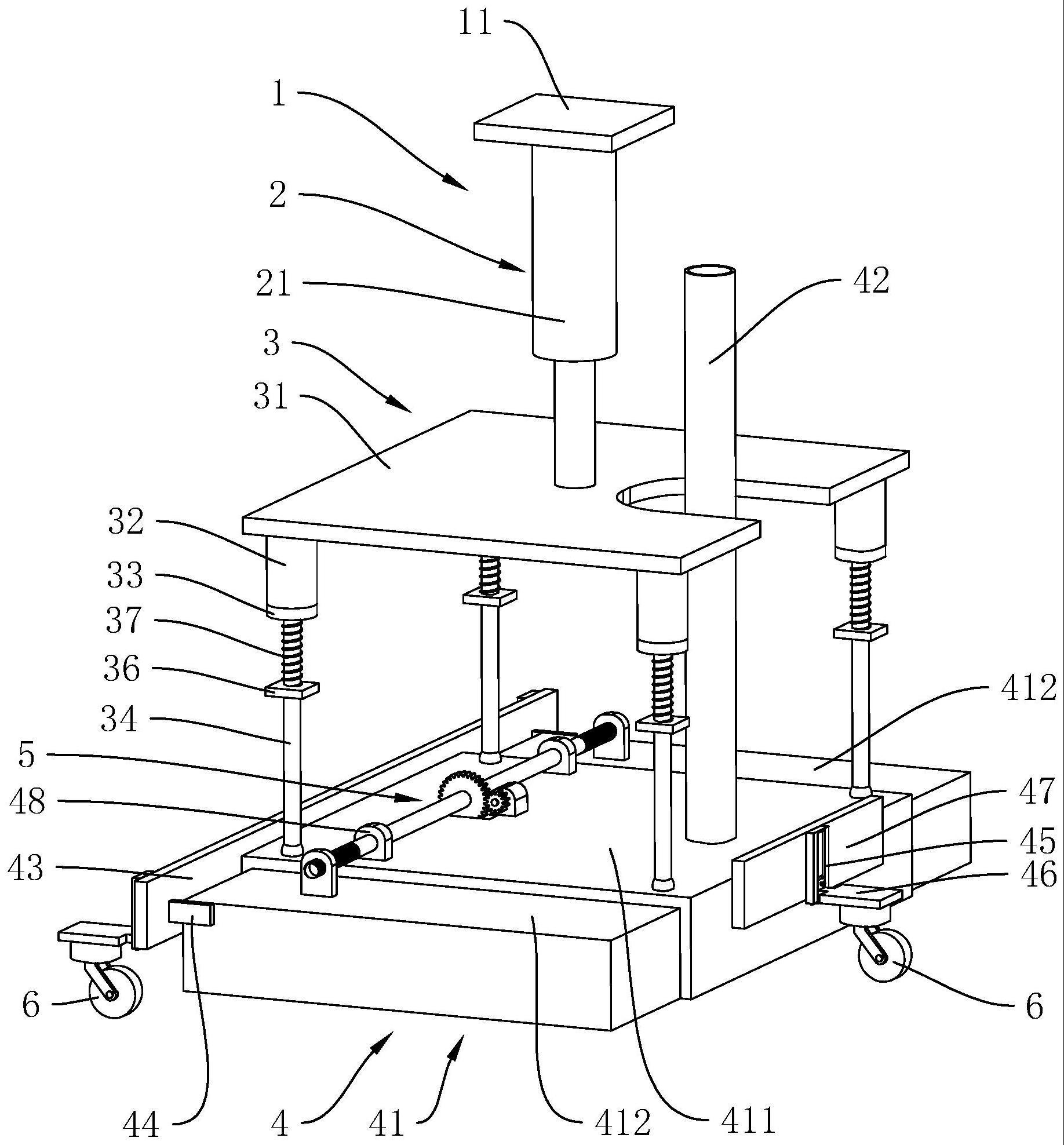
30.图1是本技术实施例整体结构示意图;
31.图2是本技术实施例展示避让组件的剖视示意图;
32.图3是本技术实施例展示副吸收罩的剖视示意图;
33.图4是本技术实施例展示丝杆的结构示意图。
34.附图标记说明:1、安装架;11、连接板;2、升降组件;21、第一驱动源;3、避让组件;31、基座板;32、套筒;33、端盖;34、导向杆;35、滑块;36、挡板;37、弹簧;4、垃圾吸收组件;41、垃圾吸收罩;411、主吸收罩;412、副吸收罩;42、垃圾吸管;43、第一安装板;44、限位板;45、滑轨;46、调节板;47、第二安装板;48、轴承座;5、驱动组件;51、第二驱动源;52、丝杆;53、主动齿轮;54、从动齿轮;55、螺母固定座;6、支撑轮。
具体实施方式
35.以下结合附图1-4对本技术作进一步详细说明。
36.本技术实施例公开的一种扫地车用动态避让吸口机构,参照图1,扫地车用动态避让吸口机构包括沿竖直方向依次连接的安装架1、避让组件3和垃圾吸收组件4。安装架1包括固定连接于扫地车底盘的连接板11和升降组件2,升降组件2设置在避让组件3和连接板11之间,用于调整避让组件3和垃圾吸收组件4到扫地车底盘的间距。
37.参照图1,升降组件2包括第一驱动源21,在本实施例中,第一驱动源21为伸缩气缸,第一驱动源21一端固定连接于连接板11底部。避让组件3包括基座板31,第一驱动源21的活塞杆端部与基座板31固定连接。当操作第一驱动源21时,可以带动基座板31升降,并带动避让组件3和垃圾吸收组件4进行升降,使得吸口机构可以适应不同的车型安装,并且在不清理垃圾时,垃圾吸收组件4可以提升,降低垃圾吸收组件4损坏的可能。
38.参照图1和图2,避让组件3还包括套筒32和导向杆34,套筒32固定在基座板31底部,且套筒32的轴线垂直于基座板31。导向杆34包括顶部的滑块35,滑块35与套筒32内侧壁滑动配合。套筒32远离基座板31的一端可拆卸连接有端盖33,端盖33与套筒32可以是螺纹连接,也可以是卡接。导向杆34贯穿端盖33,导向杆34与端盖33滑动配合。基座板31和端盖33可以限制滑块35的活动范围,使滑块35在端盖33和基座板31之间滑动。
39.参照图1和图2,导向杆34固定连接有挡板36,导向杆34贯穿挡板36,挡板36和滑块35分别位于端盖33两侧,挡板36与端盖33之间设置有弹簧37,导向杆34贯穿弹簧37,弹簧37分别与端盖33和挡板36抵接。
40.参照图1和图2,垃圾吸收组件4包括垃圾吸收罩41,垃圾吸收罩41设置有用于和路面相抵的支撑轮6,导向杆34远离滑块35的一端与垃圾吸收罩41通过球铰座转动连接。当扫地车行驶在不平整的路面时,支撑轮6与路面保持接触,垃圾吸收罩41在支撑轮6的支撑作
用下,能够通过带动导向杆34上的滑块35相对于套筒32移动来适应路面变化,使垃圾吸收罩41与路面的距离较为稳定,使垃圾吸收罩41能够保持稳定的吸力来吸收垃圾,提高垃圾清理效果。
41.参照图1和图2,由于导向杆34与垃圾吸收罩41通过球铰座转动连接,且导向杆34上的滑块35与套筒32内侧壁滑动配合,使得垃圾吸收罩41可以进行转动,以适应不同坡度的路面,进一步使垃圾吸收罩41与路面的距离较为稳定,使垃圾吸收罩41能够保持稳定的吸力来吸收垃圾,提高垃圾清理效果。
42.参照图1和图2,当垃圾吸收罩41在支撑轮6的支撑作用下带动导向杆34上的滑块35朝基座板31移动时,导向杆34上的挡板36也朝端盖33移动,使弹簧37压缩,此时弹簧37对挡板36产生向下的弹力,弹簧37向下的弹力通过导向杆34作用于垃圾吸收罩41和支撑轮6上,使支撑轮6更易贴合路面。
43.参照图1和图2,垃圾吸收罩41包括主吸收罩411,在本实施例中,避让组件3设置有四个,四条导向杆34均与主吸收罩411球头铰接。当操作第一驱动源21使垃圾吸收罩41升降时,四条导向杆34与垃圾吸收罩41相连,使垃圾吸收罩41能够保持平稳状态,在第一驱动源21带动垃圾吸收罩41提升时使垃圾吸收罩41不易产生倾斜翻转,降低垃圾吸收罩41损坏的可能。
44.参照图3,垃圾吸收罩41还包括副吸收罩412,在本实施例中,副吸收罩412设置有两个,主吸收罩411两侧各设置一个副吸收罩412。主吸收罩411两侧开设有滑槽,副吸收罩412一端与滑槽侧壁滑动配合。副吸收罩412能够相对于主吸收罩411滑动,使垃圾吸收罩41的覆盖区域发生改变,在路面垃圾较小时可扩大垃圾吸收罩41的覆盖范围,以提高清理效率;在路面垃圾较大时可缩小垃圾吸收罩41的覆盖范围,便于垃圾的吸收清理。
45.参照图1和图3,主吸收罩411和副吸收罩412均开设有开口,主吸收罩411和副吸收罩412的开口均朝向路面,主吸收罩411穿设有垃圾吸管42,主吸收罩411和副吸收罩412共同形成垃圾吸收腔,垃圾吸管42与垃圾吸收腔连通。在垃圾清理过程中,垃圾吸管42通过风机产生吸力,将主吸收罩411和副吸收罩412覆盖区域内的垃圾吸入扫地车内。在本实施例中,垃圾吸管42为可伸缩的软管,可跟随主吸收罩411移动,便于在不平整路面保持较好的垃圾吸收效果。
46.参照图4,主吸收罩411上设置有驱动组件5,驱动组件5包括第二驱动源51和丝杆52,在本实施例中,第二驱动源51具体为电机。第二驱动源51固定连接在主吸收罩411上,主吸收罩411固定连接有轴承座48,丝杆52贯穿轴承座48,丝杆52与轴承座48转动连接。第二驱动源51的输出轴上同轴固定有主动齿轮53,丝杆52上同轴固定有从动齿轮54,主动齿轮53与从动齿轮54啮合。驱动组件5还包括固定于副吸收罩412上的螺母固定座55,在本实施例中,每个副吸收罩412设置有一个螺母固定座55。丝杆52为双向丝杆,设置有两个螺纹段,两个螺纹段旋向相反。丝杆52贯穿两个螺母固定座55,丝杆52分别与两个螺母固定座55螺纹连接。第二驱动源51带动主动齿轮53转动,主动齿轮53带动从动齿轮54转动,从动齿轮54带动丝杆52转动,丝杆52转动能够带动螺母固定座55沿丝杆52轴向移动,由于丝杆52两段螺纹旋向相反,使两个螺母固定座55能够相向移动或者背向移动,使两个副吸收罩412能够同时朝远离主吸收罩411方向移动或者朝靠近主吸收罩411方向移动,从而能够改变垃圾吸收区域的大小。
47.参照图1和图4,主吸收罩411一端固定连接有第一安装板43,第一安装板43固定连接有两个限位板44。副吸收罩412朝远离主吸收罩411方向移动后,能够与限位板44抵接,限位板44能够限制副吸收罩412的移动范围,使副吸收罩412在移动时不易与主吸收罩411脱离。
48.参照图1和图4,主吸收罩411远离第一安装板43的一端固定连接有第二安装板47,第一安装板43和第二安装板47上均设置有滑轨45,滑轨45上滑动设置有调节板46,支撑轮6的支架与调节板46固定连接,调节板46可相对于滑轨45滑动,在滑动至合适位置后,可通过螺栓进行固定。调节板46能够相对于滑轨45移动,能够带动支撑轮6相对于垃圾吸收罩41移动,便于调节垃圾吸收罩41到路面的距离,以达到较好的垃圾吸收效果。在本实施例中,第一安装板43上安装有两个支撑轮6,第二安装板47上安装有一个支撑轮6,通过三个支撑轮6支撑垃圾吸收罩41,使垃圾吸收罩41在扫地车行驶时能够保持平稳。
49.本技术实施例一种扫地车用动态避让吸口机构的实施原理为:当扫地车清理垃圾时,支撑轮6与路面接触,支撑轮6支撑垃圾吸收罩41,在路面不平整时,垃圾吸收罩41能够带动导向杆34上的滑块35相对于套筒32移动来适应路面变化,使垃圾吸收罩41与路面的距离保持稳定,使垃圾吸收罩41能够维持较大的吸力吸收垃圾,提高垃圾清理效果。当扫地车不清理垃圾时,第一驱动源21可以带动垃圾吸收罩41提升,降低垃圾吸收罩41损坏的可能。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1